4 using System.Collections.Generic;
7 using System.Reflection;
8 using System.ComponentModel;
9 using System.Windows.Forms;
10 using System.Runtime.Serialization;
11 using System.Security.Permissions;
12 using System.Globalization;
15 [System.SerializableAttribute()]
16 [System.ComponentModel.TypeConverterAttribute(typeof(System.ComponentModel.ExpandableObjectConverter))]
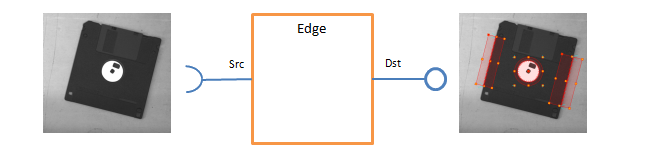
17 public partial class ParserNodeUser : FVIL.Parser.ParserNodeUnit
19 public override void Execute(
object sender, System.EventArgs e)
21 FVIL.Data.CFviImage target1_out0 =
new FVIL.Data.CFviImage(256, 240, FVIL.ImageType.UC8, 1);
22 FVIL.Edge.CFviEdgeResult target2_out0 =
new FVIL.Edge.CFviEdgeResult();
23 FVIL.Edge.CFviEdgeResult target3_out0 =
new FVIL.Edge.CFviEdgeResult();
24 FVIL.Edge.CFviEdgeResult target4_out0 =
new FVIL.Edge.CFviEdgeResult();
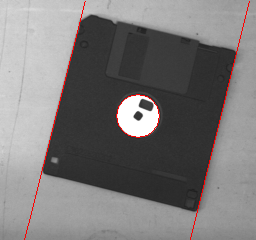
25 FVIL.Data.CFviLine target5_out0 =
26 new FVIL.Data.CFviLine(1, 0.2532541721230761, -84.620416859384008);
27 FVIL.Data.CFviLine target6_out0 =
28 new FVIL.Data.CFviLine(1, 0.24762089172587431, -249.30331288145166);
29 FVIL.Data.CFviCircle target7_out0 =
30 new FVIL.Data.CFviCircle(137.67168616358185, 115.42045679202695, 21.639257493825262);
31 FVIL.Data.CFviCircle target8_out0 =
32 new FVIL.Data.CFviCircle(137.67168616358185, 115.42045679202695, 21.639257493825262);
33 FVIL.Data.CFviPoint target8_out1 =
34 new FVIL.Data.CFviPoint(137.67168616358185, 115.42045679202695);
35 double target8_out2 = 21.639257493825262;
36 double target8_out3 = 137.67168616358185;
37 double target8_out4 = 115.42045679202695;
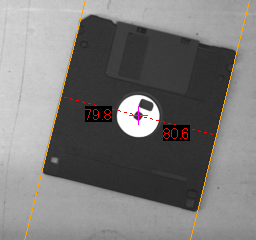
38 double target9_out0 = 79.763799312042011;
39 double target10_out0 = 80.616337793131365;
42 target1_out0 = ((FVIL.Parser.IDataObject<FVIL.Data.CFviImage>)(ParserInfo)).Infos[0].Data;
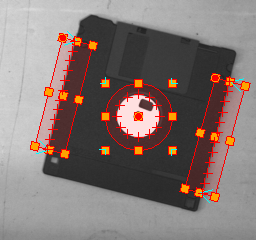
45 FVIL.Edge.CFviBoxEdge target2 =
new FVIL.Edge.CFviBoxEdge();
46 target2.SrcImages[0] = target1_out0;
47 target2.Result = target2_out0;
48 target2.MaxThreshold = 75;
52 target2.EdgeDirection = FVIL.Edge.Direction.BrightToDark;
53 target2.LineWidth = 0;
54 target2.Threshold = -1;
55 target2.ScanDirection = FVIL.ScanDirection.Right;
57 target2.Box =
new FVIL.Data.CFviRectangle(
58 60, 37.288247321445432, 90.92518839821922, 148.83211150513876,
59 14.403819866037779, 0, 8.7117526785545678);
63 FVIL.Edge.CFviBoxEdge target3 =
new FVIL.Edge.CFviBoxEdge();
64 target3.SrcImages[0] = target1_out0;
65 target3.Result = target3_out0;
66 target3.MaxThreshold = 75;
70 target3.EdgeDirection = FVIL.Edge.Direction.BrightToDark;
71 target3.LineWidth = 0;
72 target3.Threshold = -1;
73 target3.ScanDirection = FVIL.ScanDirection.Left;
75 target3.Box =
new FVIL.Data.CFviRectangle(
76 212, 76.920616462741449, 243.12403515431902, 191.80449871795281,
77 15.390940092953223, 0, 11.079383537258551);
81 FVIL.Edge.CFviRadialEdge target4 =
new FVIL.Edge.CFviRadialEdge();
82 target4.SrcImages[0] = target1_out0;
83 target4.Result = target4_out0;
84 target4.Threshold = 25;
85 target4.ScanDirection = FVIL.Edge.ScanDirection.Inward;
87 target4.Radial =
new FVIL.Data.CFviCircle(138, 116, 33.498769231142433);
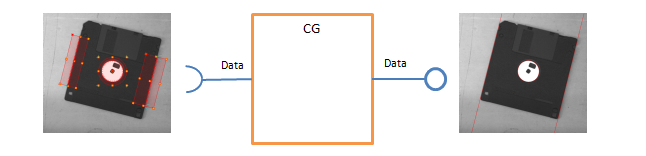
91 target5_out0 = FVIL.CG.Function.FitLine(
92 new FVIL.DPNT_T_ARRAY(
new FVIL.DPNT_T_ARRAY(target2_out0)), FVIL.CG.FitMode.MESTIMATOR, 3.291);
95 target6_out0 = FVIL.CG.Function.FitLine(
96 new FVIL.DPNT_T_ARRAY(
new FVIL.DPNT_T_ARRAY(target3_out0)), FVIL.CG.FitMode.MESTIMATOR, 3.291);
99 target7_out0 = FVIL.CG.Function.FitCircle(
100 new FVIL.DPNT_T_ARRAY(
new FVIL.DPNT_T_ARRAY(target4_out0)), FVIL.CG.FitMode.MESTIMATOR, 3.291);
103 target8_out0 = target7_out0;
104 target8_out1 = target8_out0.Center;
105 target8_out2 = target8_out0.Radius;
106 target8_out3 = target8_out0.X;
107 target8_out4 = target8_out0.Y;
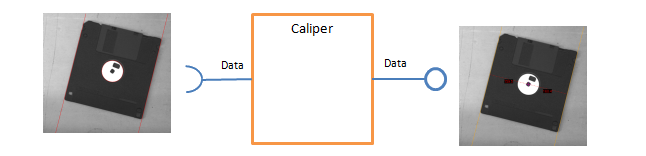
110 target9_out0 = FVIL.Caliper.Function.Distance(target8_out1, target5_out0);
113 target10_out0 = FVIL.Caliper.Function.Distance(target8_out1, target6_out0);