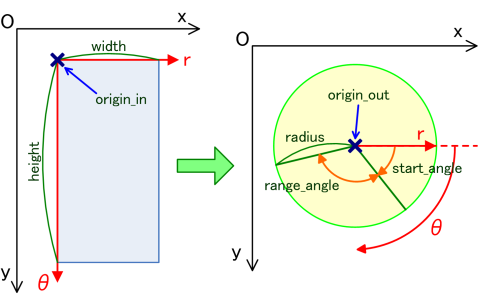
極座標変換パラメータは、 FVCL::PolarTrans::CFvPolarTransParam に集約しています。 下図に、このクラスが保有するパラメータの対応関係を示します。
左が入力側、右が出力側とします。coordinate_mode は Left を指定しているものとします。 本体のクラスが持つ『変換方向の反転フラグ』によって、入力と出力の意味は反転します。
- 変換方向が正方向の時 (FVCL::PolarTrans::CFvPolarTrans::m_Invert = false)
矩形(origin_in)から円形(origin_out)に変換します。 この場合は、入力画像に矩形状の画像があり、円形に変換したものを出力画像へ格納する事を意味します。
- 変換方向が逆方向の時 (FVCL::PolarTrans::CFvPolarTrans::m_Invert = true)
円形(origin_out)から矩形(origin_in)に変換します。 この場合は、入力画像に円形状の画像があり、矩形に変換したものを出力画像へ格納する事を意味します。
| 項目 | メンバフィールド | メソッド | 意味 | 変換方向との関係 |
| origin_in | m_OriginIn | SetOriginIn GetOriginIn | 矩形領域の基準座標 | 正方向(m_Invert = false)の時は、処理対象領域を意味します。 逆方向(m_Invert = true)の時は、出力領域を意味します。 |
| width | m_Width | SetWidth GetWidth | 矩形領域の幅 | 〃 |
| height | m_Height | SetHeight GetHeight | 矩形領域の高さ | 〃 |
| origin_out | m_OriginOut | SetOriginOut GetOriginOut | 円形領域の回転中心座標 | 正方向(m_Invert = false)の時は、出力領域を意味します。 逆方向(m_Invert = true)の時は、処理対象領域を意味します。 |
| radius | m_Radius | SetRadius GetRadius | 円形領域の半径 | 〃 |
| start_angle | m_StartAngle | SetStartAngle GetStartAngle | 円形領域の回転開始角度 | 〃 |
| range_angle | m_RangeAngle | SetRangeAngle GetRangeAngle | 円形領域の回転範囲 | 〃 |
| coordinate_mode | m_CoordinateMode | SetCoordinateMode GetCoordinateMode | 矩形領域の基準座標モード | 正方向(m_Invert = false)の時は、処理対象領域を意味します。 逆方向(m_Invert = true)の時は、出力領域を意味します。 |