特徴量
[FPM(特徴点応用マッチング)]
関数 | |
| FHANDLE FVALGAPI | fnFIE_fpm_feature_alloc (FHANDLE himage, enum f_fpm_mode matching_mode, enum f_fpm_featedge method, const F_FPM_FEATURE *pfeature_param, BOOL border, INT *perr_code) |
| 特徴量を取得 | |
| FHANDLE FVALGAPI | fnFIE_fpm_feature_window_alloc (FHANDLE himage, BOX_T window, enum f_fpm_mode matching_mode, enum f_fpm_featedge method, const F_FPM_FEATURE *pfeature_param, BOOL border, INT *perr_code) |
| ウィンドウを指定して特徴量を取得 | |
| FHANDLE FVALGAPI | fnFIE_fpm_feature_import_alloc (F_DEDGE *img_edges, INT num_img_edges, INT img_width, INT img_height, enum f_fpm_mode matching_mode, INT *perr_code) |
| 点情報から FPM特徴量オブジェクトを生成 | |
| INT FVALGAPI | fnFIE_fpm_feature_mask (FHANDLE hfeature, FHANDLE hmask) |
| 特徴量のマスク | |
| INT FVALGAPI | fnFIE_fpm_feature_get_num (FHANDLE hfeature, INT *pfeature_num) |
| 特徴量数の取得 | |
| INT FVALGAPI | fnFIE_fpm_feature_get_edges (FHANDLE hfeature, F_DEDGE *pedges) |
| 特徴量の取得(勾配方向付きエッジ) | |
| INT FVALGAPI | fnFIE_fpm_feature_get_matching_mode (FHANDLE hfeature, enum f_fpm_mode *pmatching_mode) |
| 特徴量取得マッチングモードの取得 | |
| INT FVALGAPI | fnFIE_fpm_feature_get_method (FHANDLE hfeature, enum f_fpm_featedge *pmethod) |
| 特徴量抽出手法の取得 | |
関数
| FHANDLE FVALGAPI fnFIE_fpm_feature_alloc | ( | FHANDLE | himage, | |
| enum f_fpm_mode | matching_mode, | |||
| enum f_fpm_featedge | method, | |||
| const F_FPM_FEATURE * | pfeature_param, | |||
| BOOL | border, | |||
| INT * | perr_code | |||
| ) |
特徴量を取得
画像オブジェクトから特徴量を抽出し、特徴量オブジェクト(F_OBJID_FPM_FEATURE)を生成します。
- 引数:
-
[in] himage 特徴量を計測する対象となる画像オブジェクト (画像タイプ:uc8 のみ対応)
チャネル数は 1 でなければいけません。[in] matching_mode FPMを行う際のマッチングモード - F_FPM_NORMAL_MODE 通常モード
- F_FPM_SPEED_MODE 高速モード
[in] method 特徴量抽出手法 - F_FPM_SOBEL_EDGE ソーベルによる特徴量抽出
- F_FPM_CORR_EDGE 相関エッジによる特徴量抽出
- F_FPM_SOBEL_MAX_EDGE 強度上限付ソーベルによる特徴量抽出
- F_FPM_CORR_MAX_EDGE 強度上限付相関エッジによる特徴量抽出
- F_FPM_GROOVE_EDGE 細線エッジによる特徴量抽出
[in] pfeature_param 特徴量計測パラメータ [in] border 特徴量抽出時のボーダー処理 - TRUE ボーダー処理を行う
- FALSE ボーダー処理を行わない
[out] perr_code 正常終了、またはエラーコードが入力されます。エラーコードを受け取る必要の無い場合は、NULLを指定します。 - F_ERR_NONE 正常終了
- F_ERR_INVALID_IMAGE 引数画像オブジェクトが異常
- F_ERR_INVALID_PARAM 引数異常
- F_ERR_NOMEMORY メモリ不足
- F_ERR_FPM_NOFEATURE 特徴量が見つかりません。
- F_ERR_NO_LICENCE ライセンスエラー、または未初期化エラー
- 戻り値:
- 正常終了した場合は、生成したFPM特徴量オブジェクトのハンドルを返します。 異常終了により生成できなかったときはNULLを返します。
- 注意:
- FPM特徴量オブジェクトが不要になったら、必ず fnFIE_free_object() で解放してください。
- 入力する画像オブジェクトの ステップサイズが 8で割り切れない場合には画像のコピーを行うため処理時間が余計にかかります。 特に、F_FPM_NORMAL_MODEで実行する場合, 画像オブジェクトを fnFIE_img_root_import_alloc() で確保した場合にはお気をつけください。
| FHANDLE FVALGAPI fnFIE_fpm_feature_window_alloc | ( | FHANDLE | himage, | |
| BOX_T | window, | |||
| enum f_fpm_mode | matching_mode, | |||
| enum f_fpm_featedge | method, | |||
| const F_FPM_FEATURE * | pfeature_param, | |||
| BOOL | border, | |||
| INT * | perr_code | |||
| ) |
ウィンドウを指定して特徴量を取得
画像オブジェクトの特定の範囲から特徴量を抽出し、特徴量オブジェクト(F_OBJID_FPM_FEATURE)を生成します。
- 引数:
-
[in] himage 特徴量を計測する対象となる画像オブジェクト (画像タイプ:uc8 のみ対応)
チャネル数は 1 でなければいけません。[in] window 特徴量を計測する対象画像エリアです。 [in] matching_mode FPMを行う際のマッチングモード - F_FPM_NORMAL_MODE 通常モード
- F_FPM_SPEED_MODE 高速モード
[in] method 特徴量抽出手法 - F_FPM_SOBEL_EDGE ソーベルによる特徴量抽出
- F_FPM_CORR_EDGE 相関エッジによる特徴量抽出
- F_FPM_SOBEL_MAX_EDGE 強度上限付ソーベルによる特徴量抽出
- F_FPM_CORR_MAX_EDGE 強度上限付相関エッジによる特徴量抽出
- F_FPM_GROOVE_EDGE 細線エッジによる特徴量抽出
[in] pfeature_param 特徴量計測パラメータ [in] border 特徴量抽出時のボーダー処理 - TRUE ボーダー処理を行う
- FALSE ボーダー処理を行わない
[out] perr_code 正常終了、またはエラーコードが入力されます。エラーコードを受け取る必要の無い場合は、NULLを指定します。 - F_ERR_NONE 正常終了
- F_ERR_INVALID_IMAGE 引数画像オブジェクトが異常
- F_ERR_INVALID_PARAM 引数異常
- F_ERR_NOMEMORY メモリ不足
- F_ERR_FPM_NOFEATURE 特徴量が見つかりません。
- F_ERR_NO_LICENCE ライセンスエラー、または未初期化エラー
- 戻り値:
- 正常終了した場合は、生成したFPM特徴量オブジェクトのハンドルを返します。 異常終了により生成できなかったときはNULLを返します。
- 注意:
- FPM特徴量オブジェクトが不要になったら、必ず fnFIE_free_object() で解放してください。
- 入力する画像オブジェクトの ステップサイズが 8で割り切れない場合には画像のコピーを行うため処理時間が余計にかかります。 特に、F_FPM_NORMAL_MODEで実行する場合, 画像オブジェクトを fnFIE_img_root_import_alloc() で確保した場合にはお気をつけください。
| FHANDLE FVALGAPI fnFIE_fpm_feature_import_alloc | ( | F_DEDGE * | img_edges, | |
| INT | num_img_edges, | |||
| INT | img_width, | |||
| INT | img_height, | |||
| enum f_fpm_mode | matching_mode, | |||
| INT * | perr_code | |||
| ) |
点情報から FPM特徴量オブジェクトを生成
F_DEDGE 型のエッジ情報をインポートして、FPM特徴量オブジェクト(F_OBJID_FPM_FEATURE)を生成します。 自身で作成した処理によって計測したエッジ情報や、既知の幾何情報から生成した情報等を用いて、FPMを実行するためのFPM特徴量オブジェクトを生成することが可能です。
- 引数:
-
[in] img_edges F_DEDGE 型 エッジデータ [in] num_img_edges img_edges に格納されているエッジデータ数(1≦ num_img_edges) [in] img_width img_edges を取得した画像幅(1≦ img_width) [in] img_height img_edges を取得した画像高さ(1≦ img_height) [in] matching_mode FPMを行う際のマッチングモード - F_FPM_NORMAL_MODE 通常モード
- F_FPM_SPEED_MODE 高速モード
[out] perr_code 正常終了、またはエラーコードが入力されます。エラーコードを受け取る必要の無い場合は、NULLを指定することも可能です。 - F_ERR_NONE 正常終了
- F_ERR_INVALID_PARAM 引数異常
- F_ERR_NOMEMORY メモリ不足
- F_ERR_NO_LICENCE ライセンスエラー、または未初期化エラー
- 戻り値:
- 正常終了した場合は、生成したFPM特徴量オブジェクトのハンドルを返します。 異常終了により生成できなかったときはNULLを返します。
- 注意:
- 入力情報 img_edges のメンバである 強度 mag は使用しません。値が未知であっても値を計算する必要はありません。(未知の場合には 0で初期化しておいてください)
- FPM特徴量オブジェクトが不要になったら、必ず fnFIE_free_object() で解放してください。
- img_edges の入力エッジ情報は、画像処理で取得したエッジを想定しています。そのため img_edges のXYの入力値として、四捨五入して負になる、または img_width, img_height 以上になる値を入力した場合には、戻り値に F_ERR_INVALID_PARAM が返ります。
| INT FVALGAPI fnFIE_fpm_feature_mask | ( | FHANDLE | hfeature, | |
| FHANDLE | hmask | |||
| ) |
特徴量のマスク
特徴量オブジェクトに格納されている特徴量データに対してマスクを掛けた状態のデータに更新します。
- 引数:
-
[in,out] hfeature FPM特徴量オブジェクト [in] hmask マスクパタン指定用画像オブジェクト(画像タイプ:uc8 のみ対応) マスクを指定する場合には、最下位1ビットをONに指定します。hmask にNULLを渡すとマスクをとりはずします。
- 戻り値:
-
F_ERR_NONE 正常終了 F_ERR_INVALID_OBJECT 引数オブジェクトの種別が異常 F_ERR_INVALID_IMAGE 引数画像オブジェクトが異常 F_ERR_FPM_NOFEATURE 特徴量がなくなります F_ERR_NO_LICENCE ライセンスエラー、または未初期化エラー
- 注意:
- 本関数を呼び出すたびにマスク指定した部分の特徴量データが取り除かれます。異なったマスクで複数回呼び出した場合、いずれのマスクでも指定されなかった部分の特徴量データが残ります。 マスクが一度も掛かっていない時点での特徴量データを復帰させたい場合には、hmaskにNULLを渡してください。
- 使用例:
#include "fie.h" #include "oal_aloc.h" #include <stdio.h> #define RESULT_N 99 //マッチングの最大検出数 /* fnFIE_fpm_feature_maskを使ったサンプルコード このサンプルコードはマッチングを行う前に FPM特徴量オブジェクトにマスクをかけることで 画像内の任意の範囲にのみサーチを実行するものです */ VOID sample_fpm(FHANDLE hImage, FHANDLE hptn, FHANDLE hmask) { INT i,j; INT num = 0; FHANDLE huc8mask = NULL; // マスク画像用ハンドル FHANDLE hbinmask = NULL; // マスク画像用ハンドル FHANDLE hfpm = NULL; // FPMオブジェクト用ハンドル FHANDLE fpm_feat_obj = NULL; // FPMオブジェクト用ハンドル F_FPM_FEATURE feature_param; // 特徴量抽出を行う際のパラメータ設定用共用体 F_FPM_MATCH matching_param; // マッチングを行う際のパラメータ設定用構造体 F_FPM_AREASCORE areascore_param; // 領域スコア再計算を行う際のパラメータ設定用構造体 F_FPM_FEATURE pfeature_param; enum f_fpm_mode matching_mode; // マッチングモードの指定用 enum f_fpm_featedge method; // 特徴量を取得する際のエッジ取得方法の指定用 F_EDGE_SOBEL_PARAMS sobel; // ソーベルエッジ検出用パラメータ BOX_T win; // マッチングエリア指定の矩形設定用 DPNT_T offset; // マッチング回答オフセット値 INT result_num_no_mask; // マッチング結果の個数 F_SEARCH_RESULT result_no_mask[RESULT_N]; // マッチング結果の格納用配列 INT result_num_mask; // マッチング結果の個数 F_SEARCH_RESULT result_mask[RESULT_N]; // マッチング結果の格納用配列 INT image_width, image_height; // 入力画像の幅、高さ INT ptn_width, ptn_height; //パタンの幅、高さ INT mask_type; // マスク画像の種別 /*画像関係の準備*/ //入力画像のパラメータ獲得 fnFIE_img_get_params(hImage, NULL, NULL, NULL, &image_width, &image_height); fnFIE_img_get_params(hptn, NULL, NULL, NULL, &ptn_width, &ptn_height); fnFIE_img_get_params(hmask, NULL, &mask_type, NULL, NULL, NULL); //もしマスク画像が2値画像ではなかった場合2値化 hbinmask = fnFIE_img_root_alloc(F_IMG_BIN, 1, image_width, image_height); if (mask_type != F_IMG_BIN) fnFIE_binarize(hmask, hbinmask, 1); else fnFIE_img_copy(hmask, hbinmask); //2値マスク画像をコピーすることで画素値0or1の濃淡画像を作成 huc8mask = fnFIE_img_root_alloc(F_IMG_UC8, 1, image_width, image_height); fnFIE_img_copy(hbinmask, huc8mask); /*パラメータの準備*/ // サーチの手法設定 matching_mode = F_FPM_NORMAL_MODE; // マッチングモードは通常モード method = F_FPM_SOBEL_EDGE; // エッジ取得方法はソーベルエッジ // サーチのマッチングパラメータ設定 matching_param.require_result_num = RESULT_N; matching_param.min_angle = 0; matching_param.max_angle = 0; matching_param.min_scale = 100; matching_param.max_scale = 100; matching_param.polarity = F_FPM_SAME_POLARITY; matching_param.coarse_highcomp_threshold = 50; matching_param.coarse_lowcomp_threshold = 60; matching_param.coarse_err_wide = 1; matching_param.coarse_comp_rate = 3; matching_param.refine_execute = TRUE; matching_param.refine_err_wide = 1; matching_param.refine_threshold = 76; //領域スコア再計算パラメータ設定 areascore_param.err_wide = 1; areascore_param.err_wide_tx = 0.5; areascore_param.err_wide_ty = 0.5; areascore_param.err_wide_tq = 0.5; areascore_param.err_wide_ts = 0.5; areascore_param.noise_weight = 0.5; areascore_param.threshold = 76; //特徴量抽出パラメータ設定 pfeature_param.sobel_edge.mag_threshold = 120; pfeature_param.sobel_edge.nms_length = 2; //ソーベルエッジパラメータ設定 sobel.mag_threshold = 120; sobel.nms_length = 2; feature_param.sobel_edge = sobel; //マスターパタン生成用のパラメータ設定 offset.x = ptn_width / 2.0; offset.y = ptn_height / 2.0; //サーチ範囲設定 win.st.x = 0; win.st.y = 0; win.ed.x = image_width - 1; win.ed.y = image_height - 1; //マスターパタン登録 hfpm = fnFIE_fpm_alloc(hptn, NULL, offset, matching_mode, method, &feature_param, NULL); //FPM特徴量オブジェクトを生成 fpm_feat_obj = fnFIE_fpm_feature_alloc(hImage, matching_mode, method, &pfeature_param, FALSE, NULL); //マスクなしでマッチング実行 fnFIE_fpm_matching_feature(hfpm, fpm_feat_obj, NULL, win, &matching_param, result_no_mask, &result_num_no_mask); //サーチ対象画像の内、サーチしたくない部分にある特徴量をマスクで除外 fnFIE_fpm_feature_mask(fpm_feat_obj, huc8mask); //マスクありでマッチング実行 fnFIE_fpm_matching_feature(hfpm, fpm_feat_obj, NULL, win, &matching_param, result_mask, &result_num_mask); // 実行結果をコンソール出力 printf("Number of search results without mask:%d | Number of search results with mask:%d\n", result_num_no_mask, result_num_mask); printf(" x, y theta scale score | x, y theta scale score\n"); for (i = 0; i < result_num_no_mask; i++) { for (j = 0; j < result_num_mask;j++) { if (fnFIE_d4i5(result_no_mask[i].x) - fnFIE_d4i5(result_mask[j].x) == 0 && fnFIE_d4i5(result_no_mask[i].y) - fnFIE_d4i5(result_mask[j].y) == 0) { printf("%2d.[%8.3f,%8.3f] [%8.3f] [%8.3f] [%3d] | [%8.3f,%8.3f] [%8.3f] [%8.3f] [%3d] \n", i + 1, result_no_mask[i].x, result_no_mask[i].y, result_no_mask[i].q, result_no_mask[i].s, result_no_mask[i].score, result_mask[j].x, result_mask[j].y, result_mask[j].q, result_mask[j].s, result_mask[j].score); num = 1; } } if(num!=1) { printf("%2d.[%8.3f,%8.3f] [%8.3f] [%8.3f] [%3d] | delete\n",i+1, result_no_mask[i].x, result_no_mask[i].y, result_no_mask[i].q, result_no_mask[i].s, result_no_mask[i].score); } num = 0; } //オブジェクトの解放 fnFIE_free_object(hfpm); fnFIE_free_object(hbinmask); fnFIE_free_object(huc8mask); fnFIE_free_object(fpm_feat_obj); } INT main(VOID) { //ライブラリのセットアップ fnFIE_setup(); FHANDLE hImage = NULL; // 入力画像用ハンドル FHANDLE hptn = NULL; // FPMオブジェクト用ハンドル FHANDLE hmsk = NULL; // FPMオブジェクト用ハンドル //画像の読み込み fnFIE_load_bmp("smp.bmp", &hImage, F_COLOR_IMG_TYPE_UC8); fnFIE_load_bmp("ptn_C.bmp", &hptn, F_COLOR_IMG_TYPE_UC8); fnFIE_load_bmp("mask.bmp", &hmsk, F_COLOR_IMG_TYPE_UC8); //サーチの実行処理 sample_fpm(hImage, hptn, hmsk); //オブジェクト解放 fnFIE_free_object(hptn); fnFIE_free_object(hImage); fnFIE_free_object(hmsk); //ライブラリの終了処理 fnFIE_teardown(); return 0; }
(a) | 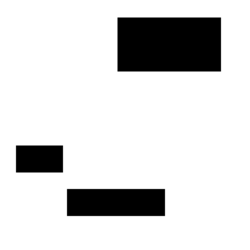
(b) | 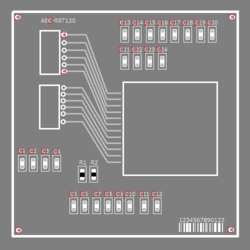
(c) | 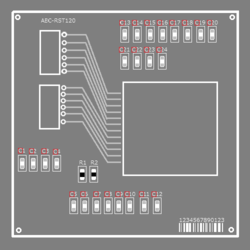
(d)
|
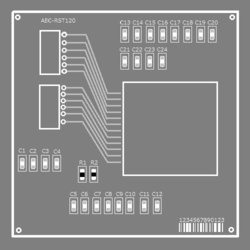
(a)サーチ対象画像。このサンプルコードでは基板上にある『C』の文字をサーチしている。
(b)マスク画像。除外したい部分が白、サーチを行いたい部分が黒となっている。
(c)本関数未使用時に検出した座標を描画した画像。四隅の穴など余計な部分も検出されてしまっている。
(d)本関数使用時に検出した座標を描画した画像。(b)画像の範囲のみの検出結果が表示されている。
| INT FVALGAPI fnFIE_fpm_feature_get_num | ( | FHANDLE | hfeature, | |
| INT * | pfeature_num | |||
| ) |
特徴量数の取得
特徴量オブジェクトに格納されている特徴量の数を取得します。
- 引数:
-
[in] hfeature FPM特徴量オブジェクト [out] pfeature_num ハンドル内に格納されている特徴量数
- 戻り値:
-
F_ERR_NONE 正常終了 F_ERR_INVALID_OBJECT 引数オブジェクトの種別が異常 F_ERR_INVALID_PARAM 引数異常 F_ERR_NO_LICENCE ライセンスエラー、または未初期化エラー
| INT FVALGAPI fnFIE_fpm_feature_get_edges | ( | FHANDLE | hfeature, | |
| F_DEDGE * | pedges | |||
| ) |
特徴量の取得(勾配方向付きエッジ)
特徴量オブジェクトに格納されている特徴量データを勾配方向付きエッジ情報データ型で取得します。
- 引数:
-
[in] hfeature FPM特徴量オブジェクト [out] pedges 取得した特徴量データ 予め fnFIE_fpm_feature_get_num() によって特徴量の数を取得し、必要な領域を確保する必要があります。
- 戻り値:
-
F_ERR_NONE 正常終了 F_ERR_INVALID_OBJECT 引数オブジェクトの種別が異常 F_ERR_INVALID_PARAM 引数異常 F_ERR_NO_LICENCE ライセンスエラー、または未初期化エラー
- 注意:
- 強度の出力値は0が入ります。
| INT FVALGAPI fnFIE_fpm_feature_get_matching_mode | ( | FHANDLE | hfeature, | |
| enum f_fpm_mode * | pmatching_mode | |||
| ) |
特徴量取得マッチングモードの取得
特徴量オブジェクトを生成した際のマッチングモードを取得します。
- 引数:
-
[in] hfeature FPM特徴量オブジェクト [out] pmatching_mode FPMを行う際のマッチングモード - F_FPM_NORMAL_MODE 通常モード
- F_FPM_SPEED_MODE 高速モード
- 戻り値:
-
F_ERR_NONE 正常終了 F_ERR_INVALID_OBJECT 引数オブジェクトの種別が異常 F_ERR_INVALID_PARAM 引数異常 F_ERR_NO_LICENCE ライセンスエラー、または未初期化エラー
| INT FVALGAPI fnFIE_fpm_feature_get_method | ( | FHANDLE | hfeature, | |
| enum f_fpm_featedge * | pmethod | |||
| ) |
特徴量抽出手法の取得
特徴量オブジェクトを生成した際の特徴量抽出手法を取得します。
- 引数:
-
[in] hfeature FPM特徴量オブジェクト [out] pmethod 特徴量抽出手法 - F_FPM_CORR_MODE 相関エッジ
- F_FPM_SOBEL_MODE ソーベルエッジ
- F_FPM_CORR_MAX_MODE 強度上限付相関エッジ
- F_FPM_SOBEL_MAX_MODE 強度上限付ソーベルエッジ
- F_FPM_GROOVE_EDGE 細線エッジ
- 戻り値:
-
F_ERR_NONE 正常終了 F_ERR_INVALID_OBJECT 引数オブジェクトの種別が異常 F_ERR_INVALID_PARAM 引数異常 F_ERR_NODATA 抽出手法は存在しません( FPMオブジェクトは fnFIE_fpm_feature_import_alloc() によって生成されました ) F_ERR_NO_LICENCE ライセンスエラー、または未初期化エラー