- HOME
- 【画像処理マスターへの道】高精度位置決め実験レポート ~超精密ステージで1μmの壁に挑む!
装置メーカー 計測・検査・位置合わせ
【画像処理マスターへの道】
高精度位置決め実験レポート
~超精密ステージで1μmの壁に挑む!
画像処理に関するさまざまな情報をお届けする連載です。
超精密ステージとの組み合わせによる高精度位置決め実験を行ってきましたので、今回はその内容をご紹介します。
はじめに
近年、半導体の後工程プロセスの微細化が進み、正しい位置で加工するための位置合わせにも1μm以下のサブミクロン単位の精度が求められるようになってきています。
これまでもステージ単体のスペックとしてこの精度を実現できるものは存在してはいましたし、画像処理としては高倍率のレンズを組み合わせれば画素分解能としては実現できることは分かっていました。しかしながら、ステージと画像のそれぞれ単体ではわずかな誤差ではあっても、誤差の重ね合わせが生じるシステム全体として実現できることが肝要です。
この度、計測環境や測定装置などの面で我々だけでは難しい部分を、ステージメーカであるヒーハイスト株式会社様にご協力いただくことで、今回の実験を行うことができました。ご多忙のところご協力をいただきましたこと、御礼申し上げます。
実験環境
ステージはヒーハイスト株式会社様に超精密XYθステージNAFHW3C-16をご用意いただきました。このステージは絶対位置決め精度で3μm(θ軸:12 sec)、追従性で50nmという高精度な仕様のものです。
画像処理には当社の位置決め装置FV-alignerⅡ(モーションボードを搭載したUNTタイプ)を使用します。光学系は正方形センサの25Mピクセルカメラと6倍のテレセントリックレンズを組み合わせた、画素分解能0.417μm/pixelの構成です。
μm単位となると、振動や温湿度などの影響も無視できなくなります。そこで、一定温湿度で管理され、コンクリート床も独立してダンパ機能を持たせた環境として、ヒーハイスト株式会社様の出荷検査場をお借りしました。
また、カメラの画像以外の外部的な測定器としてレニショーのレーザ測長器 XL-80を使用します。こちらはヒーハイスト株式会社様が出荷検査でスペック(絶対位置決め精度や追従性など)を満たしていることを確認して検査成績書を作成される際に使用されているものをお借りしました。
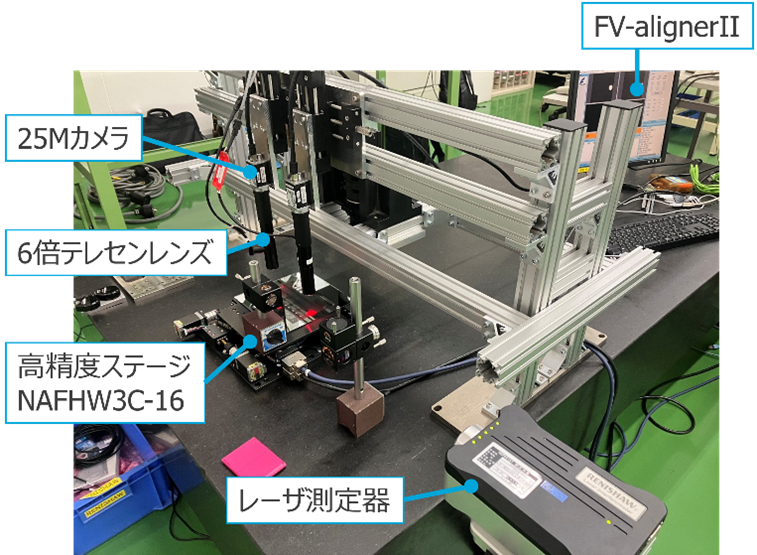 実験環境の様子
実験環境の様子
超精密XYθステージ NAFHW3C-16
 (クリックで拡大)
(クリックで拡大)
| 超精密XYθステージ NAFHW3C-16 |
精密XYθステージ NAF3C-16K00 |
|
|---|---|---|
| 絶対位置決め精度 |
XY軸:3μm |
— |
| 繰り返し位置決め精度 |
XY軸:±0.35μm |
XY軸:±0.7μm |
| ロストモーション |
XY軸:0.70μm |
XY軸:2μm |
| 追従性 | 50nm | — |
位置決め装置FV-alignerⅡ
カメラでマークを検出し、目標位置と対象ワークのズレ量を計算し、ステージを動かして対象ワークを目標位置に移動します。
独自のキャリブレーション方法や位置の合わせ込み方法による高精度と、さまざまなステージ構成やカメラ配置、対象に応じたアライメント計算方法を選択するだけで立ち上げ可能な手間なしも両立します。また、ユニットタイプではステージ制御までを完結できることも特徴です。
製品ページ:https://www.inrevium.com/product/fv-aligner/
実験結果
次の5つの内容をご紹介します:
- ステージの移動量と画像内の移動量の相関
- キャリブレーションの収束回数
- アライメントにおける超精密ステージと通常版ステージの収束回数の差異
- 超精密ステージでの1μm以下のアライメントの実現性
- 静止状態のサーチ安定性
ステージの移動量と画像内の移動量の相関
ステージ上に画像で検出するマークを設置し、X方向またはY方向に0.1mmピッチで-0.5mmから+0.5mmまで往復移動させます。このときのレーザ測長器の移動量と画像上でマークを検出したサーチ結果を比較します。0.1mmの移動量は画素分解能から計算すると約239.8ピクセルに相当します。
目的はステージの移動量に対するマークを検出したサーチ結果の追従性を確認することです。簡易的にはステージへの移動指令と比較すれば良いのですが、移動指令に対して実際にステージが移動する量には、駆動するボールねじのかみ合わせの隙間(バックラッシ)による誤差が含まれ得ます。そこで、実際のステージの移動量を外部的な測定器であるレーザ測長器で測定し、その測定値とサーチ結果を比較します。
結果は相関係数でX方向が0.99999831、Y方向が0.99999835となり、良好な結果が得られました。
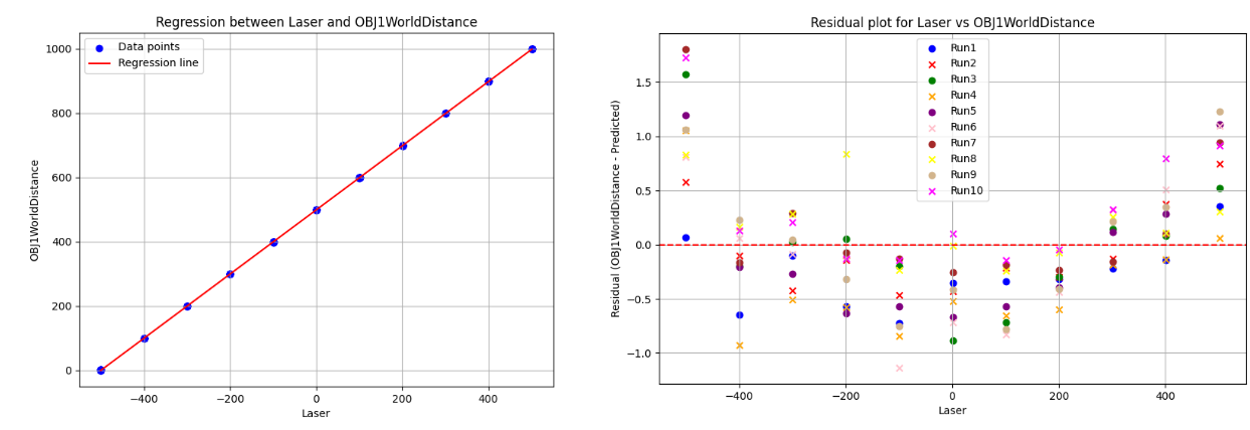
左図:レーザ測長器で測定した移動量を横軸に、
マーク検出のサーチ結果の移動量を縦軸にプロットしたグラフ(X方向の移動、赤線は回帰直線)
右図:回帰直線に対する残差をプロットしたグラフ
キャリブレーションの収束回数
位置決め装置FV-alignerⅡのキャリブレーションでは、ステージの各軸への移動指令を高精度に計算するため、ステージの回転中心を算出しています。この高精度化のために複数回の収束動作を行います。この実験では収束回数を通常より多めの10回に設定して収束の様子を解析します。
目的は収束までに十分な回数を確認することです。経験的に3回程度で運用されることが多いですが、改めて環境の良い場所で実験を行います。また、サブミクロンレベルにおける既存のキャリブレーション手法の有効性を確認する目的もあります。
結果は本実験環境でも3回程度で収束しており、高分解能においても既存のキャリブレーション手法の有効性と、3回程度で収束するという経験則の妥当性を確認することができました。
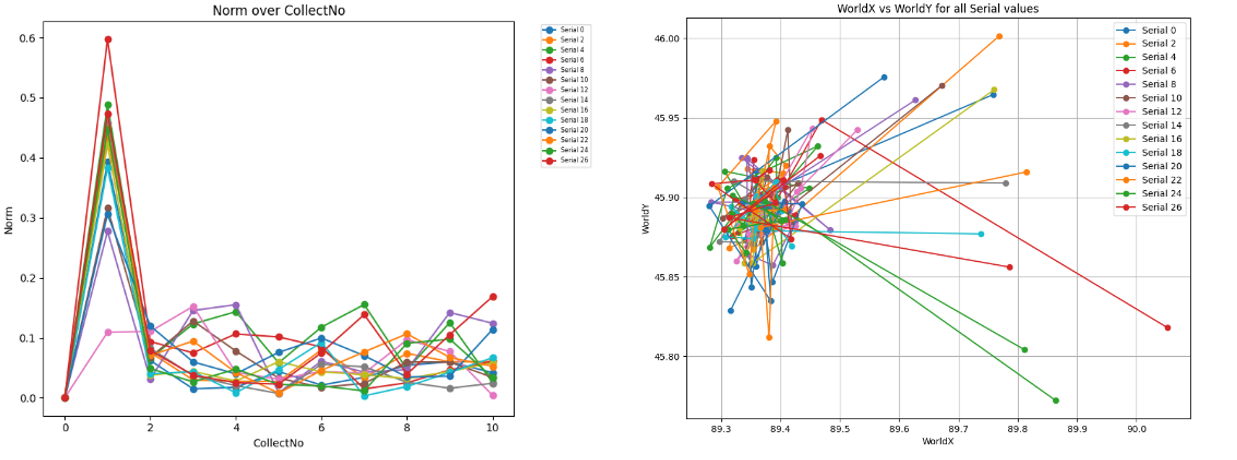
左図:キャリブレーションを複数回実施したときの、
各キャリブレーションの中での各収束動作における補正量の大きさ(3回目以降はほぼ横ばい)
右図:各収束動作で求められたステージ回転中心の座標をプロットしたグラフ
(初期位置にはバラツキがあるが同じ位置に向けて収束していく様子が見て取れる)
アライメントにおける超精密ステージと通常版ステージの収束回数の差異
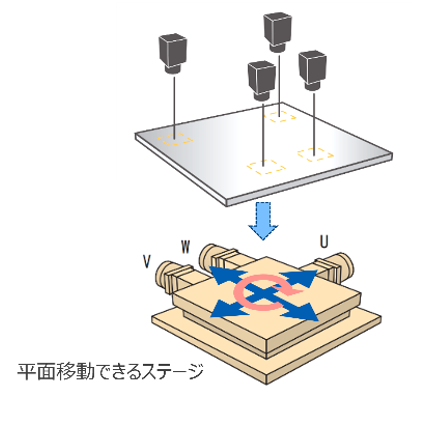
ランダムな位置からアライメントを行い、整合判定規格(目標位置とのズレ量の許容値)を厳しくしていったときのアライメント完了までの収束回数を比較します。位置決め装置FV-alignerⅡのオートアライメント機能を使用し、アライメント手法は2マーク対応点(本実験では目標位置は2つのカメラのそれぞれの中心を設定)を使用します。アライメント動作の概要は次の通りです。
① 対象ワークのマークを検出
② 目標位置に対するズレ量(位置と傾き)を算出
③ ズレ量が事前に設定した整合判定規格未満であればOKで終了
④ 整合回数が事前に設定した上限を超えていたらNGで終了
⑤ ステージ移動量を算出してステージを移動、①に戻る
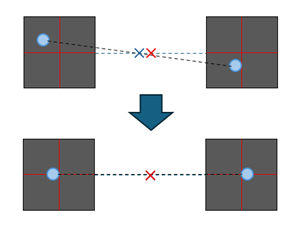
2マーク対応点(目標位置:カメラ中心)のイメージ図
白い丸マークをカメラ中心(赤色十字)に合わせていく
目的は超精密ステージ(NAFHW3C-16)の通常版ステージ(NAF3C-16K00)に対する優位性を確認することです。超精密ステージは、通常版ステージと比較したロストモーションや追従性などの優位性から、より少ない整合回数でアライメント完了になることが期待されます。
結果は目的の仮説を裏付けることができました。
整合判定規格が10μmのときにはどちらも1回でアライメント完了できますが、1μmとなると超精密ステージは約80%が2回以内に完了するのに対して通常版ステージでは約20%弱しか2回以内には完了できませんでした。0.5μmとなると、超精密ステージは約半数が5回以内に、約95%が10回以内に完了するのに対して、通常版ステージでは5回以内の完了は約30%、10回以内の完了は約70%弱です。
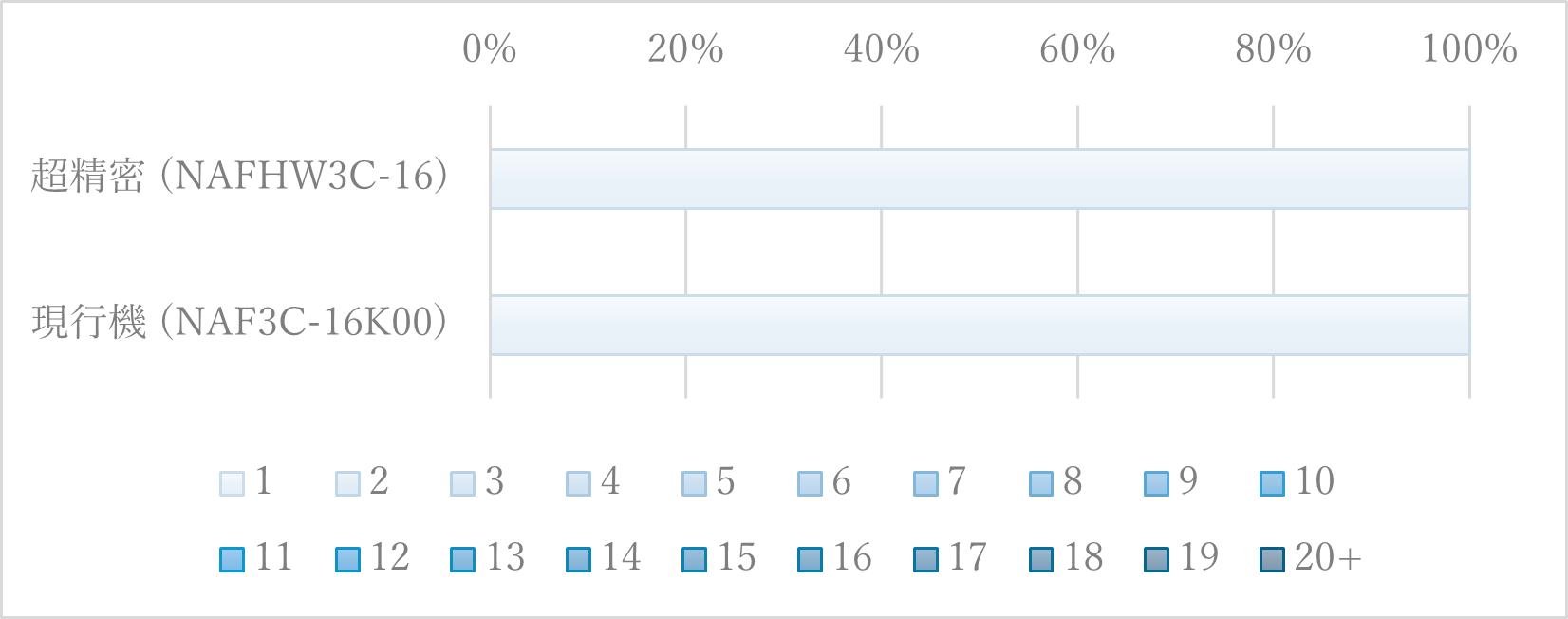
整合判定規格が10μmのときの整合回数
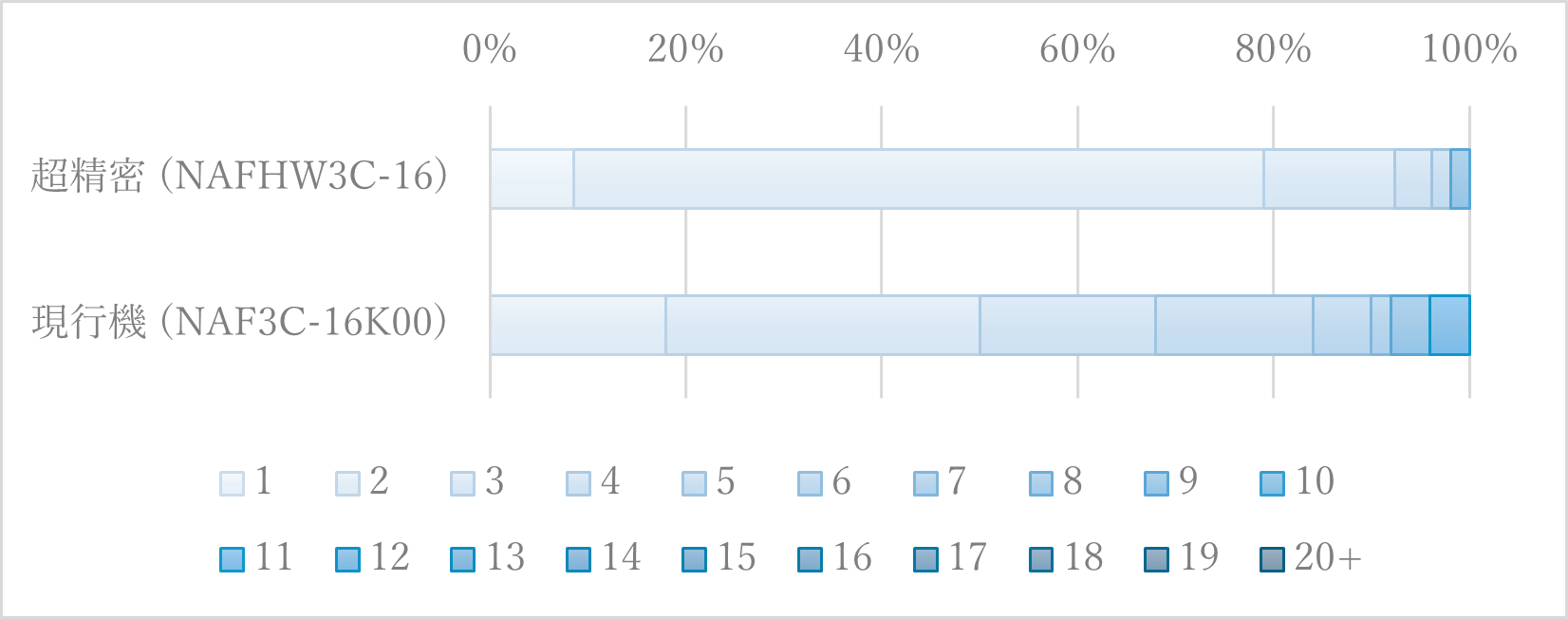
整合判定規格が1μmのときの整合回数
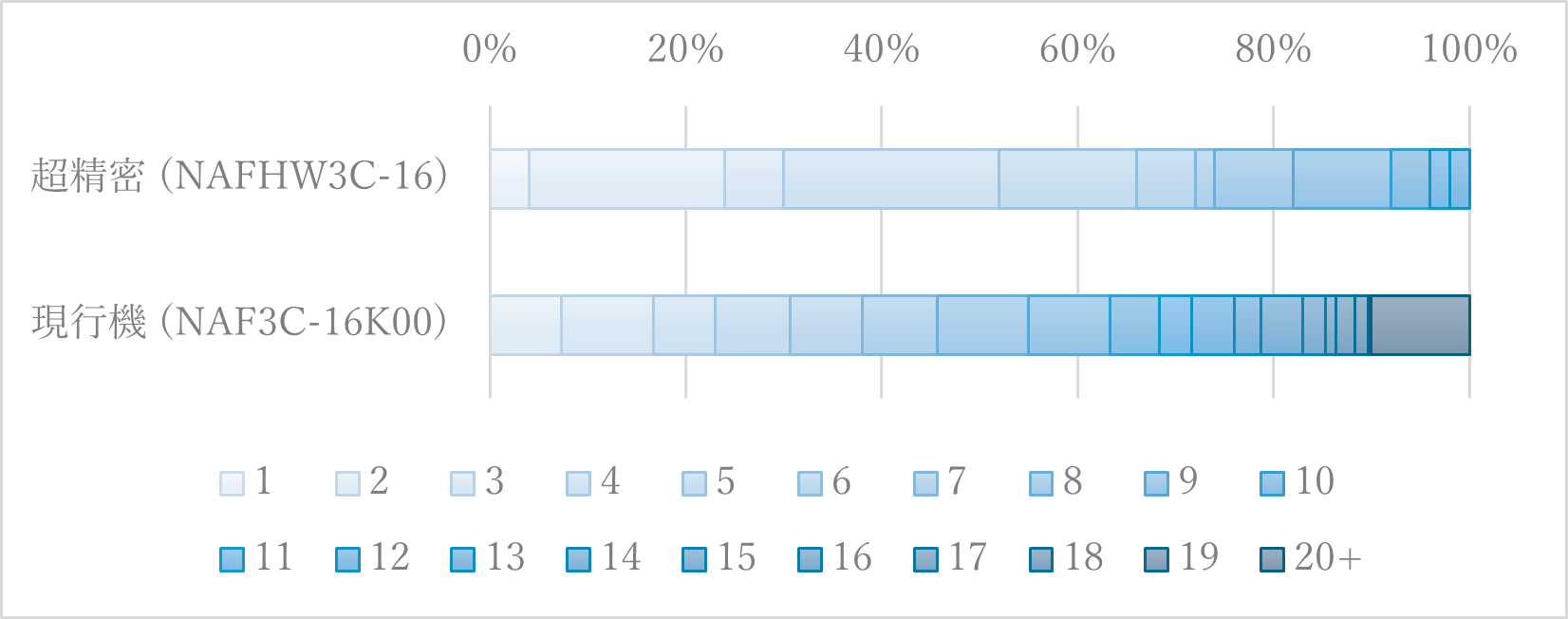
整合判定規格が0.5μmのときの整合回数
超精密ステージでの1μm以下のアライメントの実現性
更にサブミクロンレベルのアライメントの実現性も確認するため、整合判定規格を1μmより厳しくしていったときの超精密ステージの整合回数を確認します。
結果は今回の実験環境では、画素分解能(0.417μm/pixel)の約2倍に相当する0.8μm程度までは10回以内にアライメント完了できます。画素分解能より少し大きい0.5μmは前述の通り約95%が10回以内に完了し、残りの約5%も20回以内には完了できています。
経験的には画素分解能相当までは実用可能であったことからそのような光学系選定をご提案してきました。今回の実験では期待に少し及ばない結果となってしまいました。この原因は後述の静止状態のサーチ安定性から考えられるカメラ固定の不十分さであると考えています。
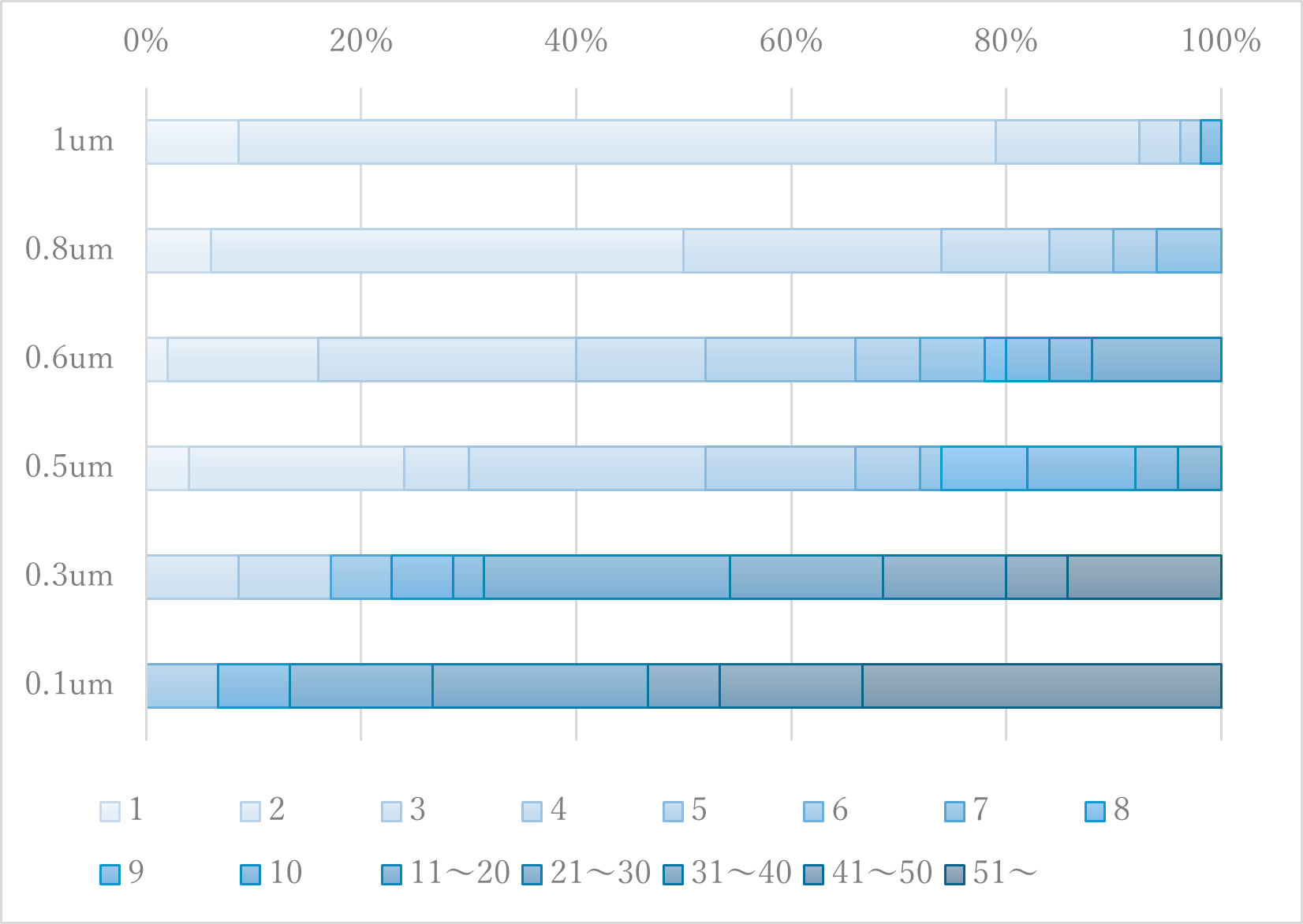
超精密ステージで整合判定規格を1μmにしたときの整合回数
静止状態のサーチ安定性
ステージを静止した状態でマークの検出を繰り返し、検出された位置の統計量を解析します。検出するマークも静止しているはずですので、分散はゼロになることが期待されます。
結果は3σで±2画素から±6画素程度のバラツキが見られました。ほとんど同じ画像に対する画像処理のサーチ結果としては想定よりも大きすぎる結果です。
傾向としては画像内の垂直方向のバラツキが大きいことが分かりました。カメラ取付治具を固定しているピント調整用の手動ステージの遊びで、わずかな振動の影響を受けている可能性があります。実際にカメラのケーブルに触れるとカメラの撮像範囲も主に画像内の垂直方向に大きく移動してしまう状況でした。補強も試みてはいましたが完全ではなかったようです。
前述の通り、この影響がアライメントの整合回数(収束回数)を想定よりも悪化させてしまったものと考えています。
| カメラCH0 X方向 |
カメラCH0 X方向 |
カメラCH1 X方向 |
カメラCH1 Y方向 |
|
|---|---|---|---|---|
| 超精密ステージ (NAFHW3C-16) |
1.492 |
2.234 |
1.593 |
4.643 |
| 通常版ステージ (NAF3C-16K00) |
2.052 |
3.954 |
2.645 |
5.952 |
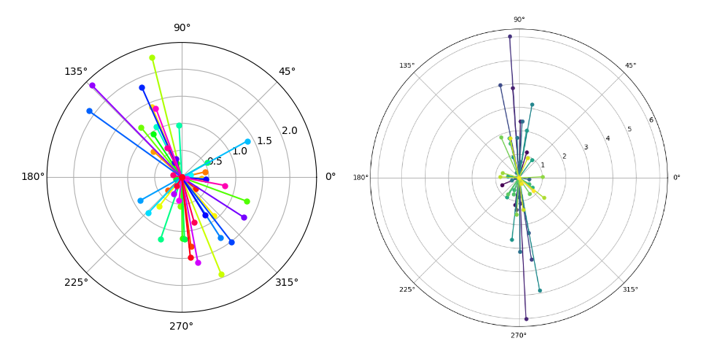
超精密ステージ(NAFHW3C-16)での直前のマーク検出位置との移動量をプロットしたグラフ
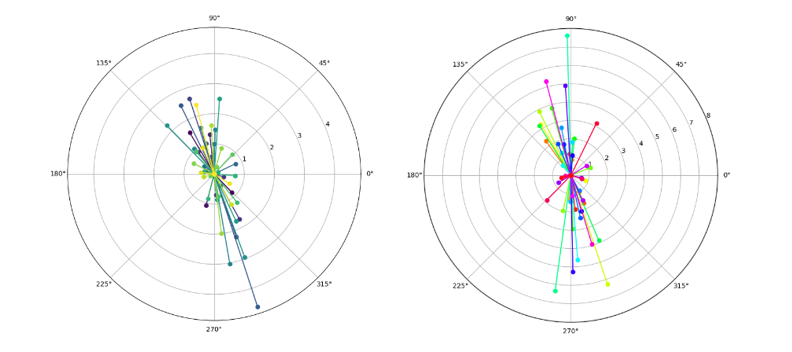
通常版ステージ(NAF3C-16K00)での直前のマーク検出位置との移動量をプロットしたグラフ
まとめ
今回はヒーハイスト株式会社様のご協力を得て実施した高精度位置決め実験の結果をご紹介しました。
産業用カメラでは2MピクセルやVGAなどが多く使用されていますが、サブミクロンレベルの画素分解能となると画素数の少ないカメラでは視野が非常に狭くて、マークが視野内に入らないなどの難しさがあります。昨今、イメージセンサの高画素化も進み、今回使用したような25Mピクセルクラスの産業用カメラの普及も進んできました。
また、画素数の多いカメラを使用すると画像も巨大になるので、それを処理できるマシンスペックも必要になってきます。最新のFV1420モデルなどではIntel第12世代CPUを搭載していますので、このような巨大な画像でも短時間で処理できるようになってきます。技術の発展が位置決め精度の高精度化に追いついてきていると言えるのかもしれません。
もちろん、サブミクロン単位での移動を実現できるステージも不可欠です。
アライメント完了までの整合回数(収束回数)の違いという形で、ヒーハイスト株式会社様の超精密ステージNAFHW3C-16の優位性を確認することができました。整合判定規格(位置決めの許容ズレ量)が10μm程度では通常版の精密ステージNAF3C-16K00との差は見られませんでしたが、1μmともなると顕著な差が見られてきました。
さて、当社ではこれまでも位置決め装置FV-alignerⅡ本体のみならず、カメラやレンズなどの光学系の選定やステージのご提案なども行ってきました。これまではスペック上の組合せではサブミクロンも出来そうだ、実現しているお客様もいらっしゃるらしいという机上または伝聞の形でしかお伝えできていませんでしたが、実際に動いているところを自分の目で見ることができ、数値的な確認もできました。
今後はこの結果をもってサブミクロンの位置決めのご相談を承った際にも胸を張って、光学系とステージもあわせて、更には身をもっての留意点などをご提案してまいります。今回は単純化した実験でしたが、任意の台数の任意のカメラ配置や、多様なアライメント方式、多様なステージの軸構成などにも対応しておりますので、お気軽にご相談いただけましたら幸いです。
今後の展望
今回の実験で心残りなのは、カメラの固定方法による振動の影響を排除しきれておらず、ステージの限界値まで追い込むことができなかった可能性が残っていることです。改めて、サブミクロンの世界ともなると、環境整備にも気を使うことを、身をもって感じるところです。
現在、第二弾の実験を計画中です。カメラの固定方法が主因と考えられる振動の影響などにも更に配慮して環境を整えて、「サブミクロンを1回でアライメントできる」を目標にしています。
第二弾でリベンジを果たせましたら、またご報告させていただきます。
謝辞
実験にあたって、2種類のステージやレーザ測長器、それらの使い方、実験環境など、様々な面でのサポートに快くご協力いただきましたヒーハイスト株式会社の皆様に、厚く御礼申し上げます。
お客様プロフィール

- 会社名
- ヒーハイスト株式会社
- 所在地
- 〒350-1151 埼玉県川越市今福580番地1
- 設立
- 1962年7月19日
- 代表
- 尾崎 浩太(代表取締役社長)
- お問い合わせ先:
- TEL:049-273-7000
FAX:049-273-7001
Contact:https://www.hephaist.co.jp/com/ask.html - WEBサイト
- https://www.hephaist.co.jp/


関連製品

-
装置メーカー 画像処理ソフト
【画像処理マスターへの道】AIを使いこなす鍵は、“弱点の補完”にあり!
-
装置メーカー 画像処理ソフト
【画像処理マスターへの道】実は身近で使われている画像処理
-
装置メーカー 画像処理ソフト
【画像処理マスターへの道】次の一歩を手前の一歩から考える~分割点灯の照らす世界~
-

装置メーカー 画像処理ハード
【画像処理マスターへの道】画像処理装置に新しいファミリーが増えています!
-

装置メーカー 画像処理ソフト
【画像処理マスターへの道】研究トレンド最前線 ~ブレイク直前の技術を先取り!~
-

装置メーカー 計測・検査・位置合わせ
【画像処理マスターへの道】高精度位置決め実験レポート~超精密ステージで1μmの壁に挑む!
-

装置メーカー 画像処理ソフト
【画像処理マスターへの道】ライブラリ新機能のご紹介~ピント合わせのお悩み解決~
-

生産現場 計測・検査
【画像処理マスターへの道】高精度位置決めリベンジ報告~めざせ、サブミクロンを1回で~