- HOME
- 製品・サービス
- 計測・検査・位置合わせ
- 位置決め・アライメント FV-alignerⅡ
製品・サービス
位置決め・アライメント FV-alignerⅡ

位置決め装置
FV-alignerⅡシリーズは、高機能・高精度位置決め用画像処理装置です。画像情報をもとに、ワークを基準位置に合わせ込むためのXYθ補正量を計算し、ステージの軸制御を行います。特にパネル状ワーク等の位置決めに最適な装置で、3軸または4軸ステージを利用した自動位置決めシステムが手間なく簡単に構築できます。
FV1420型とFV1410型では GigE Vision カメラ および USB3 Vision カメラが接続可能です。
FV2350型とFV2340型では対応する画像入力ボードを選択することでCameraLinkカメラが接続可能です。
- FV-alignerⅡの基本機能
- 特長
- マルチステージ制御
- モニタ表示のカスタマイズ
- FV-alignerⅡ応用例
- FV-alignerⅡ(FV2350) ハードウェア仕様
- FV-alignerⅡ(FV1420) ハードウェア仕様
- FV-alignerⅡ(FV2340) ハードウェア仕様
- FV-alignerⅡ(FV1410) ハードウェア仕様
- 装置を強くする画像処理 厳選ホワイトペーパー
- ドキュメントダウンロード
- 論文・特許
FV-alignerⅡの基本機能
FV-alignerⅡは、対象物をカメラで撮影し、あらかじめ任意に登録されている部位やマークを撮影画像の中から見つけ(位置の検出)、事前に指定されている位置または処理過程で自動検出した基準位置や目標位置との差異を算出し(位置ずれ量の認識)、ずれ補正に必要なXYθ移動量を計出し(補正データの生成)、通信で外部に出力する画像処理装置です。
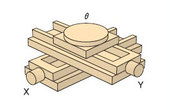
アライメント例
位置決め対象物にアライメントマークが2個、カメラ2台(2視野)、XYθステージの構成でアライメントを実行する例(STEP1~STEP3)
位置決め対象物と一体の2個のマーク
ステージ(中央十字はXYθ移動軸)
STEP1. ターゲット位置の登録時
各カメラ毎にアライメントマークを登録します。
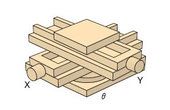
STEP2. ワーク供給からマーク検出時
パターンマッチング等の画像処理によってアライメントマークの位置情報を取得します。
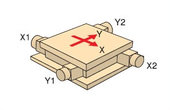
STEP3. ステージのXYθ補正量を計算して位置合わせ
ステージのXYθ補正量を計算し、補正量に応じた移動量を軸ドライバに送信します。
特長
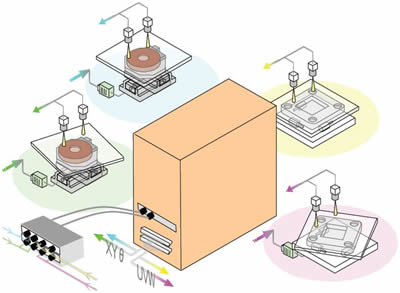
- 1台のFV-alignerⅡ本体に5台のカメラを直接接続可能
- キャリブレーションは5カメラを逐次切り替えながら自動実行、位置検出は5カメラ同時実行
- 高価な高解像度カメラは不要、標準カメラ5台でどのようなワークサイズでもアライメント可能
- 画像入力から軸(モータドライバ)制御までの処理を実行(UNTタイプ)
2タイプの装置を用意
アラインエンジン FV-alignerⅡ-ENG
位置合わせに必要な数値(補正量)だけを出力する、画像処理エンジンのみの装置です。軸制御はお客様が自由に操作できます。
アライナー FV-alignerⅡ-UNT
補正量をパルス数などに換算し、ステージ移動までのすべてを実施する装置です。FV-alignerⅡ-UNTとモーション制御ユニットをUSBケーブル接続し、直接ステージをアライメント制御します。
自動キャリブレーション機能
座標変換係数(カメラ座標をステージ座標に換算する補正係数)を自動的に取得する自動キャリブレーション機能を持っています。よってカメラ設置後の面倒な合わせ込み(鉛直度やカメラ相互の高さ調整や視野合わせ)が不要になり、またカメラ座標系からステージ座標系へ変換する複雑な計算をユーザが意識する必要もありません。これにより例えば段取り変えやワーク品種変更によってカメラ位置を変える必要性が生じた場合でも、数種類のメニューボタンをクリックするだけで自動的にキャリブレーションし、以前と同様のアライメント精度が簡単に復元できます。生産ラインでの品種変更にも手間がかかりません。
またFV-alignerⅡのキャリブレーションは、自動でマークをカメラ視野内限界まで移動させながら補正係数を生成するので、従来のFV-alignerより高精度な結果が期待できます。
※ファーストのキャリブレーションアルゴリズムは特許を取得しています。
カメラの設置が容易
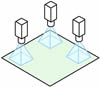
- 1台~任意台数を接続できます。*¹ *²
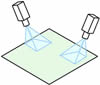
- カメラは任意の位置に設置でき、それぞれのカメラは適当に回転(360°)していても、上向きでも下向きでも、さらに極端な傾きを除きカメラの光軸が傾いても問題ありません。*³
- カメラごとの視野サイズが設置位置の高低やレンズの差異により違っていても問題ありません。
*¹:一般的には台数を多くした方が統計効果により高精度化します。
*²:カラーカメラも接続可能です。
*³:傾きが全くない場合に比べ多少精度は低下します。
カメラの設置が上向きでも下向きでも位置決めできます。
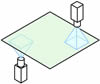
ただし光軸をステージに対して垂直に設置した時よりも僅かに精度の低下があります。
カメラを任意の位置に設置しても位置決めできます。
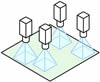
光軸を中心にカメラを回転設置しても位置決めできます。

カメラ毎に視野サイズが(高さ方向のカメラの設置位置、レンズの倍率の差異により)少々異なっていても位置決めできます。

1~4台の範囲なら何台接続しても位置決めできます。
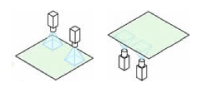
別々のワーク不問
分離しているワーク毎の任意位置にカメラを設置できます。
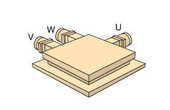
さまざまなステージ(軸構成)に対応
座標軸の構成・向き・回転を問わず、様々な座標軸構成のステージに対応しています。座標軸の向きや回転方向にも自動的に対処し、XYの座標軸が多少斜交していても内部計算で補正することが可能です(直交している場合よりは精度は低下します)。
利用できるステージの大きさに制限はありません。小型から大型まで対応します。ただ位置決め精度や全体のスループットはステージの精度や稼働速度にも左右されますので選択時にはご留意ください。
選択できる位置検出法
あらかじめ登録したパタンとの類似度を見て検出するパタンマッチングだけではなく、エッジ(縁)を利用した交点検出などを選択できます。またパタンマッチングの場合、ワークのロットによりマークが異なっても最大10種類までの登録マークを自動で切り替えながらサーチして対象マークを見つけ出す「候補サーチ」機能を搭載。


豊富な前処理フィルタ
補助機能であるフィルタ処理を施すことで画質の改善や強調をおこない、サーチの安定化を図ることが可能です。フィルタ処理として、ヒストグラム正規化/ヒストグラム平滑化/ガンマ補正/平滑化/メディアン/MIN-MAX/鮮鋭化/ガウシアンが用意されています。
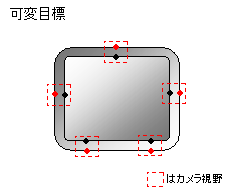
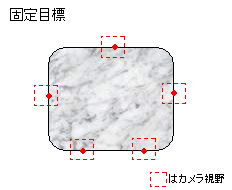
5つの視野(画像)を使ってアライメント
ソーラーパネル、スマートフォン、タブレットPCなどの組立工程におけるアライメントでは、プラスチックケースとガラス板またはフィルムなどを貼り合わせる際に
- アライメントマークが存在しない
- 四隅(コーナー)の丸みが大きいため位置検出に使用できない
- 各々のワークサイズが微妙に変化する
といったことにより、4カメラでは位置決めできない場合があります。
5マークモードでは、寸法が微妙に変化する各ワークの4辺を平行かつ均等距離にアライメントする場合に威力を発揮します。
上部パネルの辺のエッジ情報と
下部パネルの辺のエッジ情報で位置決め
3辺各々1箇所、1辺2箇所の
エッジ情報で位置決め
マルチステージ制御
※ENGタイプ若しくはUNTタイプ(USBモーションx2台)での対応となります。
1台のFV-alignerⅡで3軸構成なら最大4台、4軸構成なら最大3台までのステージを制御することが出来ます。例えば3軸ステージを4台接続する場合、4台とも同機種である必要はなく、2台はXYθ型、2台はUVW型を接続するといった構成が可能です。ステージは逐次制御です。
※ ここで言う4軸とは平面配置4軸構成のことではなく、平面移動用3軸と上下移動(オートフォーカス)用1軸構成、例えばXYθ+ZあるいはUVW+Zなどの軸構成のことです。
モニタ表示のカスタマイズ
運転中は不要なウィンドウ(例えば結果の数値表示やログ表示など)を表示せず、シンプルな画面表示にしておくことが可能です。メイン画面の各ウィンドウ表示位置やサイズも変更可能です。また映像表示では下記の切替えが可能です。
- 入力映像反転表示(回転なし、90度回転、180度回転、270度回転、水平(左右)反転、垂直(上下)反転、反転90度回転、反転270度回転)
- 出力映像反転表示(上記と同様)
- 4画面表示/2画面表示/1画面表示
モニタ表示例
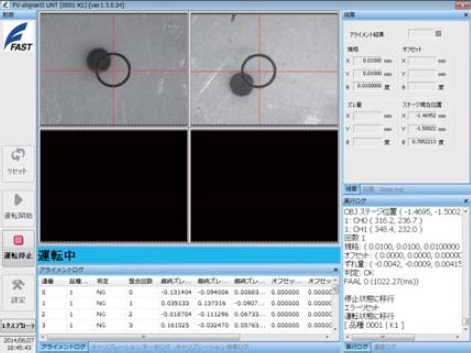
位置決め前
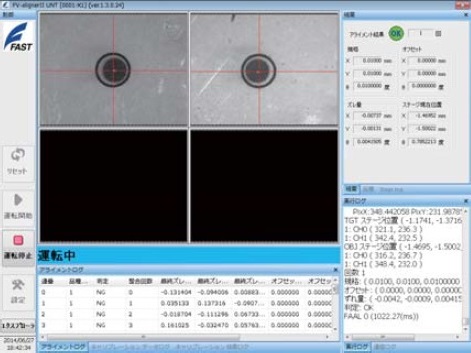
位置決め後
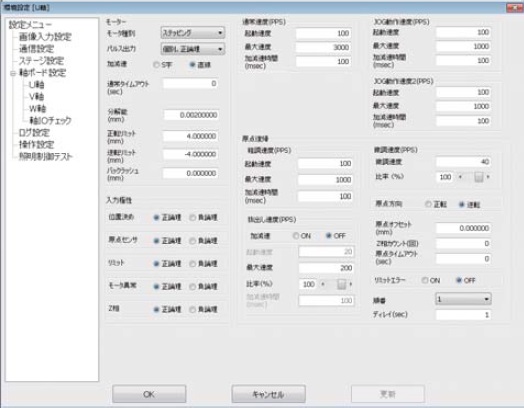
環境設定(一部)
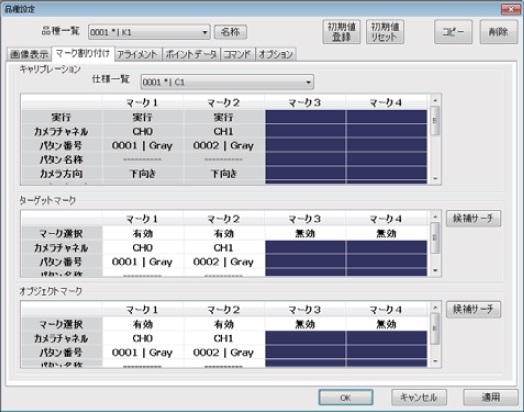
品種設定
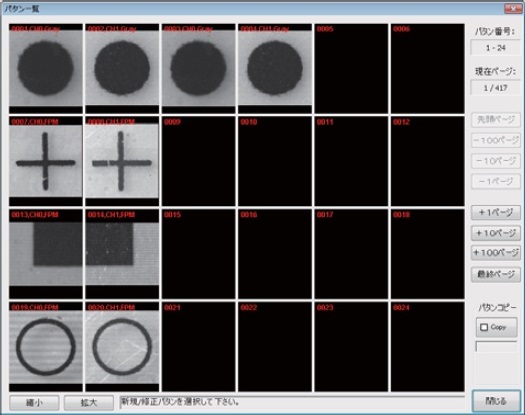
登録マーク表示
FV-alignerⅡ応用例
- 部品実装
- ピッキング
- 特性検査 (LCD点灯検査など)
- 部品切断 (ウェハ、セラミック、ガラスなど)
- 貼り合わせ (LCD,FPCなど)
- 印刷 (スクリーン印刷など)
- 露光機 (LCD,PCBなど)
- 穴空け機 (PCB,シートなど)
- 貼り付け (TAB,ACFテープなど)
FV-alignerⅡ(FV2350) ハードウェア仕様
| 映像入力チャンネル数 | 画像入力ボードによる |
|---|---|
| 入力信号 | 画像入力ボードによる |
| 水平/垂直走査周波数 | 水平・垂直ともにプログラマブル |
| アナログVGA | 最大1920×1200 32bit@60Hz 1ポート |
| HDMI | 最大4096×2160 32bit@24Hz 1ポート |
| Displayport++ | 最大4096×2304 32bit@60Hz 2ポート |
| 外部同期信号 (出力) | 画像入力ボードによる |
| LAN | (10BASE-T/100BASE-TX/1000BASE-T/2.5GBASE-T) 2ポート |
| シリアル | 2ポート |
| USB(USB2.0) | 正面1ポート |
| USB(USB3.2 Gen2) | 背面4ポート |
| フォトカプラ絶縁型I/O FV-II320 | 入力32点+割込み1点 出力32点 |
| CPU | Core i5-12500E |
| メモリ | DDR4-3200 8GB/16GB/32GB (※1) |
| チップセット | Q670E |
| PCI Express×1スロット | 1スロット Gen3 (※2) |
| PCI Express×4スロット | 2スロット Gen4 |
| PCI Express×16スロット | 1スロット Gen5 |
| ファイル装置 | システムSSD、データSSD(オプション) |
| 外形寸法 | (横幅)145mm×(奥行き)311.5mm×(高さ)275mm |
| 重量 | 約5.0kg(取付金具は含まず、画像入力ボード未搭載の場合) |
| 電源 | AC100V~240V(添付電源ケーブルは100V用) |
| 電源周波数 | 50/60Hz |
| 消費電力 | 480VA以下 |
| 動作周囲温度 | 0~40℃ |
| 動作周囲湿度 | 30~85%RH(結露の無いこと) |
| 保存周囲温度 | -20~60℃ |
| 保存周囲湿度 | 95%RH以下 |
(※1) メインメモリ容量は変わる場合があります。 お客様が独自に増設をすることは出来ません。
(※2) PCI Expressスロット4の信号仕様はPCI Express×1ですが、コネクタ形状はPCI Express×4となります。
FV-alignerII-UNT 固有仕様
| 適用可能なモータ | ステッピングモータ |
|---|---|
| パルストレイン入力対応のAC/DCサーボモータ | |
| 機 能 | 3軸制御用+Z軸制御用(1軸) |
| パルス出力周波数:6.55M PPS(リニア、台形、Sカーブ) | |
| 内部クロック:19.66MHz | |
| 8ビットのアップダウンカウンタ:0~268,435,455
または-134,217,728~+134,217,727 |
|
| 28ビットのポジションパルス設定範囲:-134,217,728~+134,217,727 | |
| パルスレート設定範囲(パルス比=1:65535の場合)
1 PPS~6553.5 PPS(Multiplier=0.1) 1 PPS~65535 PPS(Multiplier=1.0) 100 PPS~6553500 PPS(Multiplier=100) |
|
| 入出力信号 | 各軸毎に入出力可能 |
| 全入出力信号が内部と絶縁(絶縁耐圧2500Vrms) | |
| パルス出力:CW,CCW方式,パルス/方向方式 | |
| エンコーダ入力:A相, B相(4軸ステージ制御時), Z相(3軸/4軸ステージ制御時) | |
| リミットスイッチ等入力:+ELS, -ELS, OLS | |
| サーボモータ入出力:INPOS, SVALM, SVON, CTRCL | |
| 一般仕様 | コネクタ:100ピンハーフピッチ・アンフェノール
メスコネクタ(3M 102A0-52A2PE 相当品) |
※ハードウェア仕様は変更される場合があります。
※この資料内容は改良のため予告なしに変更される場合があります。
FV-alignerⅡ(FV1420) ハードウェア仕様
| 標準I/F | モニタ表示I/F | 2ポート(VGA,HDMI2.0) 最大解像度 VGA:1920×1200@60Hz、HDMI:4K2K@60Hz |
|---|---|---|
| ネットワークI/F (ETHERNET) | 1ポート RJ45 10BASE-T/100BASE-TX/1000BASE-T/2.5GBASE-T |
|
| シリアル I/F | 2ポートRS-232(EIA-232) COM1、COM2 | |
| USB 3.2 Gen1 I/F | 筐体前面 2ポート(USBトラックボール & USBキーボード用) | |
| USB 2.0 I/F | 筐体内部1ポート(USBライセンスキー用) | |
| M.2 I/F | 1ポート M.2 2280 MKey NVMe PCIe Gen3 x4 |
|
| DIDO I/F | 入力DI:32点、出力DO:32点 ・アンフェノールハーフピッチ50ピンコネクタを2個実装(DIDO1/DIDO2) ・入力デジタルノイズフィルタ(最大約267ms) ・パルスジェネレータ出力機能(最大8パターン) ※パルスジェネレータ出力機能を使用するには、FV1420専用SDKが必要になります。 |
|
| 外部 I/O | TTL 入力:8点(外部トリガ入力用4点、汎用入力用4点) オープンコレクタ出力:8点(カメラトリガ出力用4点、汎用出力用4点) |
|
| カメラI/F | PoE | 4ch入力 ・IEEE802.3af Class2に対応(最大出力電力 7W) ・PoE カメラを自動認識して電源供給(Smart PoE) ・ジャンボパケット(9KByte)対応 ・突入電流、過電流、短絡保護回路実装 ・PSE Alternative A & B |
| USB3.0 | 4ch入力 ・ポート毎に1個のコントローラを実装 ・USB3 Visionに対応 ・通常のUSB3.0ポートとしても使用可能 |
|
| 一般仕様 | CPU | Intel 12th Generation Core i5-1250PE |
| メモリ | DDR5 4800 8GByte | |
| ファイル装置 | 2.5インチSSD(容量は市場動向により変化します) SATAⅢ(6Gbps)対応 |
|
| バッテリー | コイン型 リチウム電池(CR2450) | |
| 冷却ファン | 排気用(PWM コントロール機能付) | |
| 外形寸法 | 297(横幅)×210(奥行き)×45(高さ)mm | |
| 重量 | 約2.7Kg | |
| 電源 | DC24V±10% | |
| 消費電力 | 100W以下 | |
| 動作周囲温度 | 0~40℃ | |
| 動作周囲湿度 | 30~85%RH(結露の無いこと) | |
| 保存周囲温度 | -20~85℃ | |
| 保存周囲湿度 | 95%RH以下 | |
| 適合規格 [注] | CEマーキング EMI:EN55032 EMS:EN55035 FCC Part 15, Subpart B | |
| 環境規制 | RoHS(2011/65/EU,(EU)/2015/863) |
[注] 本装置単体で適合できるよう設計されております。お客様が製作される、機械、装置、設置に関しては、設置した状態での適合確認が必要となりますのでご注意下さい。
FV-alignerⅡ(FV2340) ハードウェア仕様
FV-alignerII-ENG/UNT(FV2340)共通仕様
(選択必須)
| 映像入力チャンネル数 | 画像入力ボードによる | |
|---|---|---|
| 入力信号 | 画像入力ボードによる | |
| 水平/垂直走査周波数 | 水平・垂直ともにプログラマブル | |
| アナログVGA | 初期設定800×600 (16bit) 最大1920×1200 (32bit)(アナログモニタ非対応) | |
| 標準インターフェース | 画像入力ボードによる | |
| ネットワークI/F(ETHERNET) | EIA-232 (COM1)ボーレート、データ長など全て可変 | |
| フォトカプラ絶縁型I/O (選択必須) |
FIO01a | 入力16点+割込み1点 出力16点 |
| FV-II320 | 入力32点+割込み1点 出力32点 | |
| CPU | IntelⓇ Core™ i5-6500 3.2GHz (4Core 4Thread) | |
| PCIスロット | 2スロット | |
| PCI Express×4スロット | 1スロット | |
| PCI Express×16スロット | 1スロット | |
| メインメモリ | 4GB ※1 | |
| ファイル装置 | システムSSD、増設用データSSD | |
| 外形寸法 | (横幅)145mm×(奥行き)311.5mm×(高さ)275mm ※2 | |
| 重量 | 約5.0kg(取付金具は含まず、画像入力ボード未搭載の場合) | |
| 電源 | AC100V~240V(添付電源ケーブルは100V用) | |
| 電源周波数 | 50/60Hz | |
| 消費電力 | 480VA以下 | |
| 動作周囲温度 | 0~40℃ | |
| 動作周囲湿度 | 30~85%RH(結露の無いこと) | |
| 保存周囲温度 | -20~60℃ | |
| 保存周囲湿度 | 95%RH 以下 | |
| マウス・キーボードI/F | PS/2仕様 | |
| 漢字表示 | JIS第一水準漢字フォント | |
※1 メインメモリ容量は変わる場合があります。お客様が独自に増設をすることは出来ません。
※2 付属のゴム足(6mm)や取付金具およびコネクタの突起部は含んでおりません。
FV-aligner-UNT 固有仕様
| 適用可能なモータ | ステッピングモータ |
|---|---|
| パルストレイン入力対応のAC/DCサーボモータ | |
| 機能 | 3軸制御用+Z軸制御用(1軸) |
| パルス出力周波数:6.55M PPS(リニア、台形、Sカーブ); | |
| 内部クロック:19.66MHz | |
| 8ビットのアップダウンカウンタ:0~268,435,455 または-134,217,728 ~ +134,217,727 |
|
| 28ビットのポジションパルス設定範囲:-134,217,728 ~ +134,217,727 | |
| パルスレート設定範囲(パルス比 = 1:65535 の場合) 1 PPS ~ 6553.5 PPS(Multiplier = 0.1) 1 PPS ~ 65535 PPS(Multiplier = 1.0) 100 PPS ~ 6553500 PPS(Multiplier = 100) |
|
| 入出力信号 | 各軸毎に入出力可能 |
| 全入出力信号が内部と絶縁(絶縁耐圧2500Vrms) | |
| 1スロット | |
| パルス出力 : CW,CCW方式、パルス/方向方式 | |
| エンコーダ入力 : A相, B相(4軸ステージ制御時), Z相(3軸/4軸ステージ制御時) | |
| リミットスイッチ等入力 : +ELS, -ELS, OLS | |
| サーボモータ入出力 : INPOS, SVALM, SVON, CTRCL | |
| 一般仕様 | USBケーブル接続 |
FV-alignerⅡ(FV1410) ハードウェア仕様
| 標準I/F | モニタ表示 I/F | 1ポート(DVI-I シングルリンク) 最大 2048×1152 32ビット 60Hz 工場出荷時 1024×768 32ビット 60Hz デジタル/アナログ両対応(変換コネクタでアナログモニタ使用可) |
|---|---|---|
| ネットワークI/F (ETHERNET) | 1ポート RJ45 1000BASE-T/100Base-TX/10Base-T |
|
| シリアル I/F | モーションボード搭載時:1ポートRS-232(EIA-232) COM1 標準:2ポートRS-232(EIA-232) COM1, COM2 |
|
| USB 3.0 I/F | 筐体前面 2ポート(USBトラックボール & USBキーボード用) | |
| USB 2.0 I/F | 筐体内部1ポート(USBライセンスキー用) | |
| DIDO I/F | 入力DI:32点、出力DO:32点出力 ・アンフェノールハーフピッチ50ピンコネクタを2個実装(DIDO1/DIDO2) |
|
| 標準I/F | PoE | 4ch 入力 ・IEEE802.3af Class2に対応(最大出力電力 7W) ・PoE カメラを自動認識して電源供給(Smart PoE) ・ジャンボパケット(9KByte)対応 ・突入電流、過電流、短絡保護回路実装 ・PSE Alternative A 対応 |
| USB3.0 | 4ch 入力 ・各ポート毎に1個のコントローラを実装 ・USB3 Visionに対応 ・ 通常のUSB3.0ポートとしても使用可能 |
|
| 一般仕様 | CPU | Intel Core i5-7440EQ 2.9GHz(3.6GHz Turbo) |
| メモリ | DDR4-2400MHz 8GB(4GB×2枚搭載 デュアルチャネル) | |
| チップセット | Intel QM175 | |
| ファイル装置 | 2.5インチSSD(容量は市場動向により変化します) SATAⅢ(6Gbps)対応 |
|
| バッテリー | コイン型 リチウム電池(CR2450) | |
| 冷却ファン | 排気用(PWM コントロール機能付) | |
| 外形寸法 | 297(横幅)×210(奥行き)×45(高さ)mm (コネクタ等の突起部は含みません) | |
| 重量 | 約2.6Kg | |
| 電源 | DC24V±10% | |
| 消費電力 | 100W以下 | |
| 動作周囲温度 | 0~40℃ | |
| 動作周囲湿度 | 30~85%RH(結露の無いこと) | |
| 保存周囲温度 | -20~60℃ | |
| 保存周囲湿度 | 95%RH以下 | |
| 適合規格 [注] | CEマーキング:EMI:EN55032,EN55024 FCC:Part15,SubpartB |
|
| 環境規制 | RoHS(2011/65/EU,(EU)/2015/863) |
※1 メインメモリ容量は変わる場合があります。お客様が独自に増設をすることは出来ません。
[注] 本装置単体で適合できるよう設計されております。お客様が製作される、機械、装置、設置に関しては、 設置した状態での適合確認が必要となりますのでご注意下さい。
FV-alignerⅡ-UNT モーションボード(オプション)
| パラメータ | 値 |
|---|---|
| 軸 数 | 最大4軸制御 |
| エンコーダカウンター設定範囲 | 0~268,435,455,または-134,217,728 ~134,217,727(28-bit) |
| 位置パルス設定範囲 | -134,217,728~ 134,217,727パルス(28-bit) |
| I/Oピン | 全入出力信号が内部と絶縁(絶縁耐圧2500VRMS) |
| エンコーダ入力ピン | EA,EB |
| エンコーダインデックス入力ピン | EZ |
| リミットスイッチ等入力ピン | PEL,MEL,ORG |
| サーボモータピン | INP,ALM,ERC,SVON,SVRST |
| パルス信号出力 | OUT,DIR |
装置を強くする画像処理 厳選ホワイトペーパー
装置メーカー向け 画像処理製品カタログ
【この資料で分かること】
- 画像処理ソリューションの全体像
- 画像処理ライブラリ製品・画像処理
装置製品のそれぞれの概要と特徴 - 位置決め装置 FV-aligner II の概要とシステム構成例
【こんな方におすすめ】
- 画像処理システムの導入を検討中の方
- 既存システムの高速化・自動化を検討中の方
- 画像処理ライブラリや画像処理装置の選定に迷われている方

アライナー応用事例 10選
【この資料で分かること】
- 位置決め装置 FV-aligner II に搭載された手間無しを実現する機能
- 具体的なアライメント工程での活用事例
- システム構成例と導入メリット
【こんなお悩みや課題をお持ちの方におすすめ!】
- 新しい装置に搭載するアライメント機能をお探しの方
- 既存装置のアライメントの高精度化を検討中の方
- 顧客提案や装置開発の参考事例をお探しの方

TED AI活用事例集
【この資料で分かること】
- 多様な業界・製品でのAI活用による目視検査の自動化事例
- AI導入に至るまでのステップガイド
- AI導入にあたってのポイントや注意点
【こんなお悩みや課題をお持ちの方におすすめ!】
- 目視検査の効率化や自動化を検討中の方
- 既存の検査装置をAI活用により高精度化したい方
- AI導入に興味があるが具体的な道筋にお悩み中の方

ドキュメントダウンロード
-
各種ドキュメントダウンロード
ファースト製品に関連した取扱説明書などのドキュメント類をダウンロードできます。
-
資料ダウンロード
ファースト製品に関連したカタログや商品説明書などの資料をダウンロードできます。
論文・特許
論文
特許
-
- 特許第3531674号
- 特許第3604686号
- 特許第3977398号
- 特許第3896381号
- 特許第3896382号
- 特許第3947205号
関連製品・サービス
関連記事

位置決め・アライメント FV-alignerⅡ