- HOME
- 製品・サービス
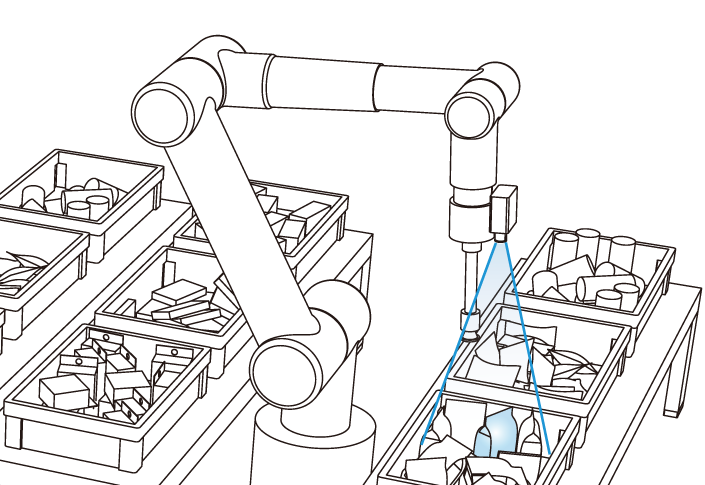
- 人依存の工程を自動化
- 材料袋のデパレタイズロボット
製品・サービス
材料袋のデパレタイズロボット
代表業種:食品・樹脂製品
材料袋は、「内容物が粉やペレットなど小さく、袋の中で自由に動くため外形が変形しやすい」、「袋を積み重ねる際に横の袋の下にもぐり込んでしまい、どちらが上に載っているかが高さ情報だけでは判断しづらい」、「袋が光沢を持っていると、撮影時に光が反射してカメラに映り込み、認識が困難になる」などの理由から個体の認識が困難でしたが、これらの課題を独自の技術で解決し、袋物のパレタイズ・デパレタイズ作業を実現しました。
導入現場
原材料の製造工場における出荷作業や原材料を使用した食品、樹脂製品の製造工場における受入、加工機へのハンドリング作業など、パレットに積まれた材料袋のハンドリング現場に導入されています。
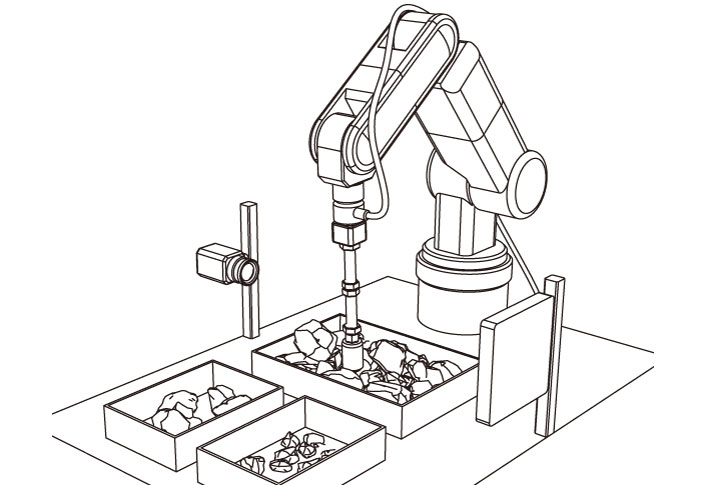
動作ポイント
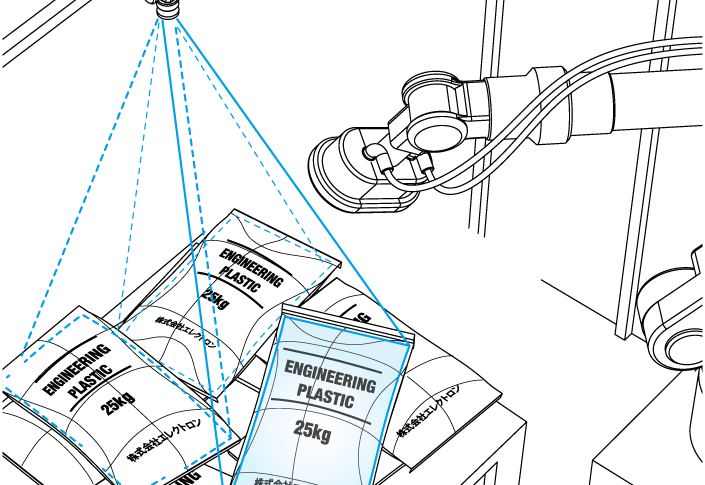
異形の袋を正確に認識
置き方によって変形した袋や皺ができた袋、袋同士が密着して一体となった袋などを正確に認識し、ハンドリングが可能です。
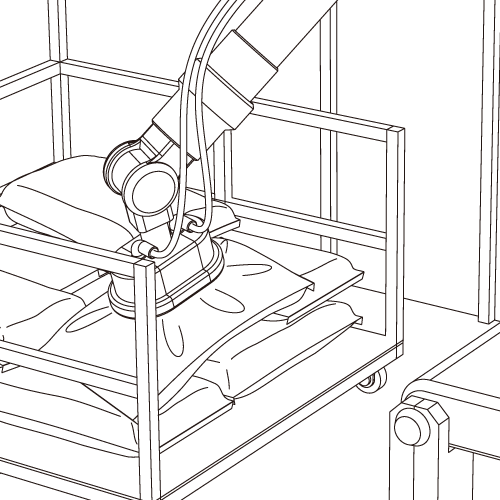
落とさず・破かず運ぶ
材料袋を落とさず、破かず運ぶためには、ロボットハンドを材料袋に正確にコンタクトさせる必要があります。本ロボットシステムは材料袋の姿勢を正確に認識し、姿勢に合わせてロボットハンドを動作させます。
作業工程
1. 袋登録
材料袋を事前に登録しておくことで、ピッキングミスを大幅に軽減するとともに、供給されている材料袋が違った種類ではないかチェックすることが可能です。チェックには、最新のAI-OCR技術を組み込むことが可能で、袋に記載されている文字情報と出荷指示情報を照会し出荷ミスをなくします。
2. 荷姿登録
材料袋を扱う上で1段4廻しなのか5廻しなのかが非常に重要です。荷姿登録機能は材料袋の登録機能と連携することで、より精度の高いピッキング作業を実現します。
3. 動作指定
・複数パレットからのデパレタイズ
扱う材料袋の供給パレットを複数設定可能。さらにデパレタイズ順の動作を指示することが可能です。
・デパレタイズ先の振り分け
複数のデパレタイズ先を設定可能。更に袋を置く向きを設定することも可能です。メニューに従い動作指示をするだけで簡単に設定が可能です。
※材料袋:クラフト袋、クラフト紙袋、紙袋、ポリプロピレン袋、ガゼット型ポリ袋、ポリエチレンガゼット袋、ガゼット袋
解決事例
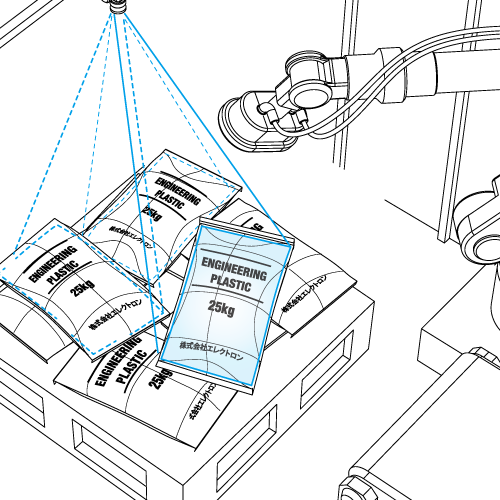
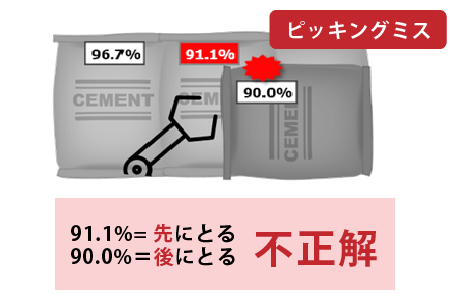
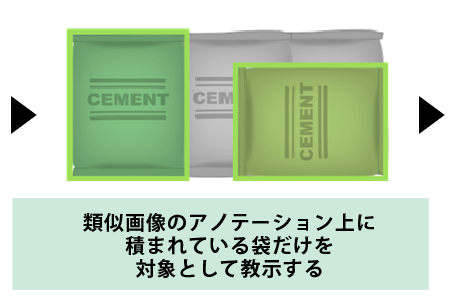
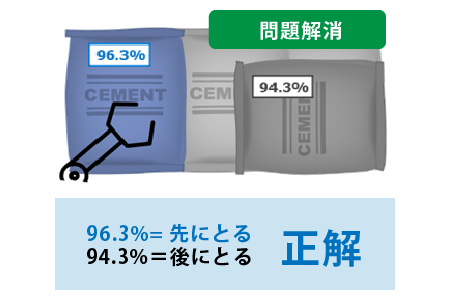
AI学習
学習した袋の画像データに加え、高い位置にある袋からピッキングしていましたが、材料袋の形状変化により、高い座標の袋が上にあるか下にあるか判断が難しく、荷崩れが発生していました。対策として、AIによる上に積まれた袋の画像学習を行い、下にある袋を誤認識しないようにしました。
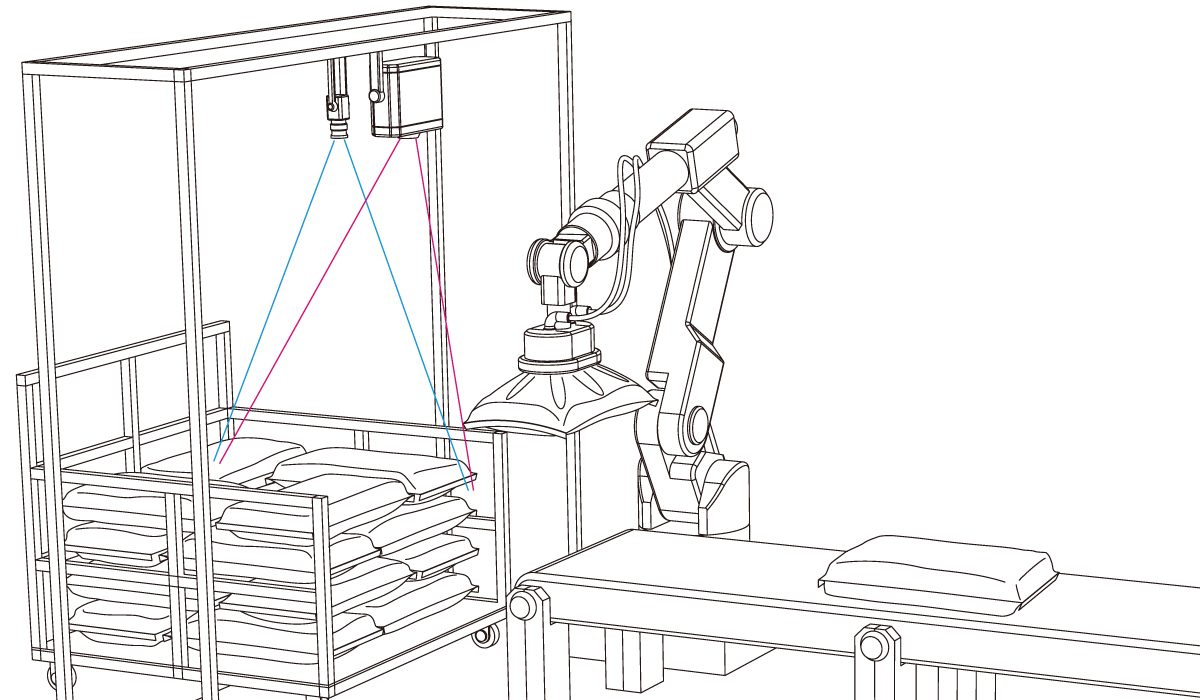
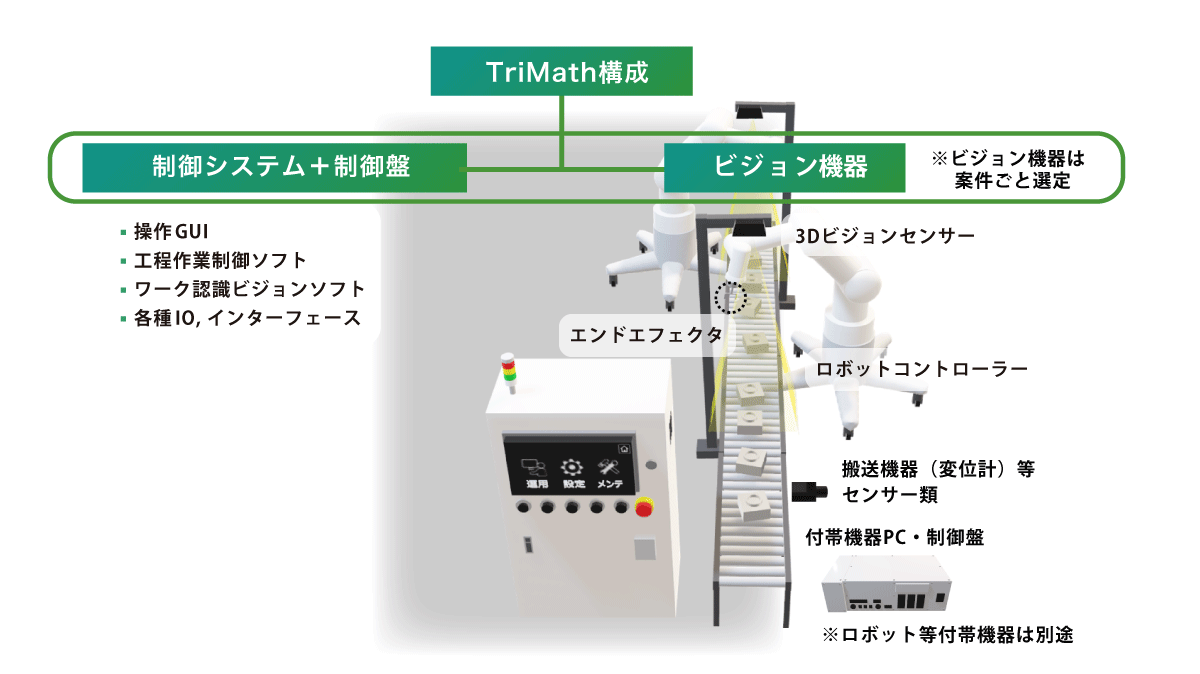
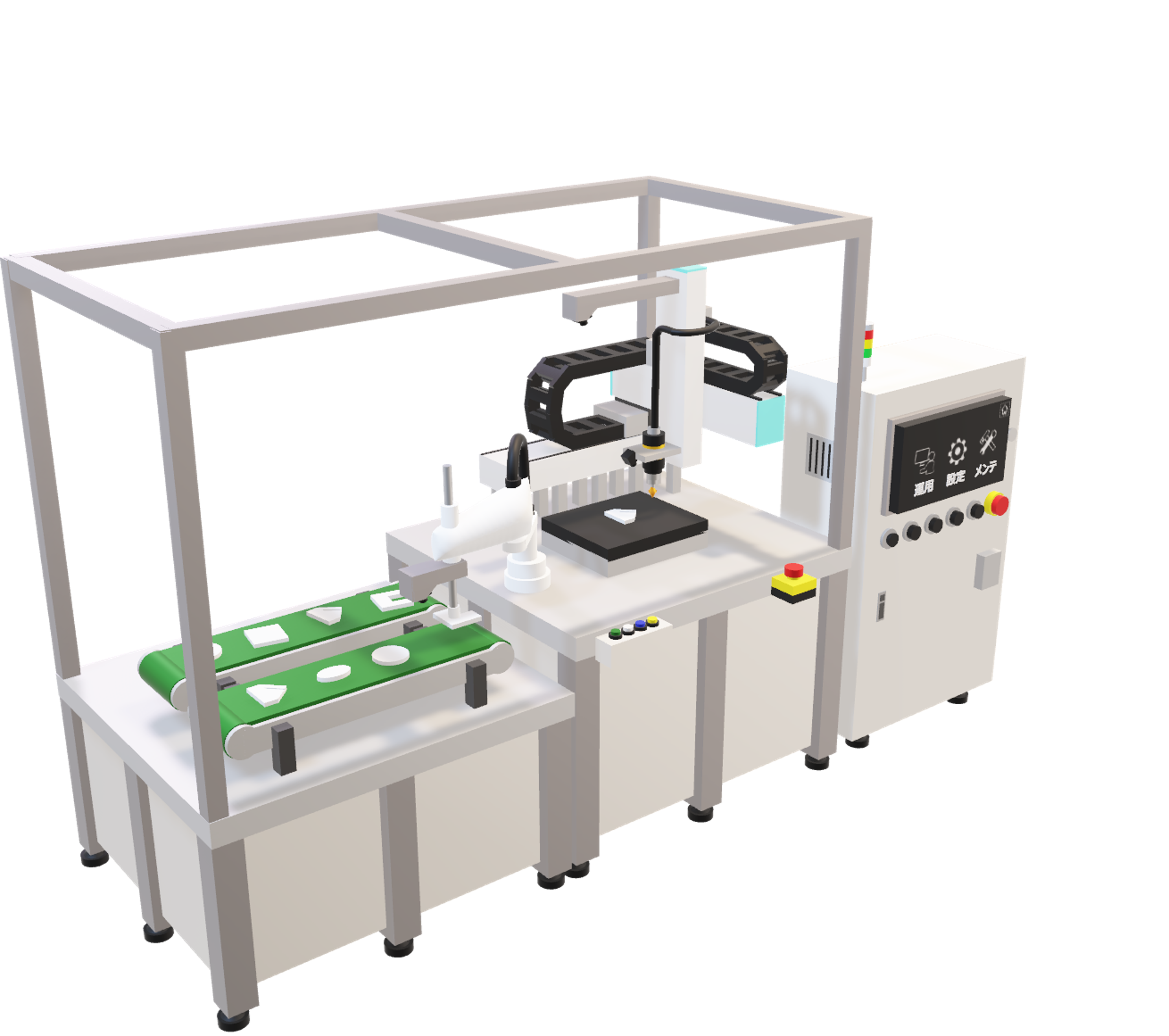
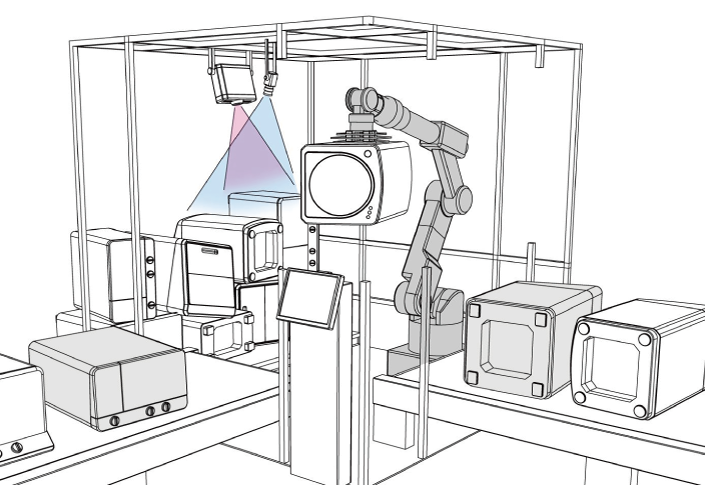
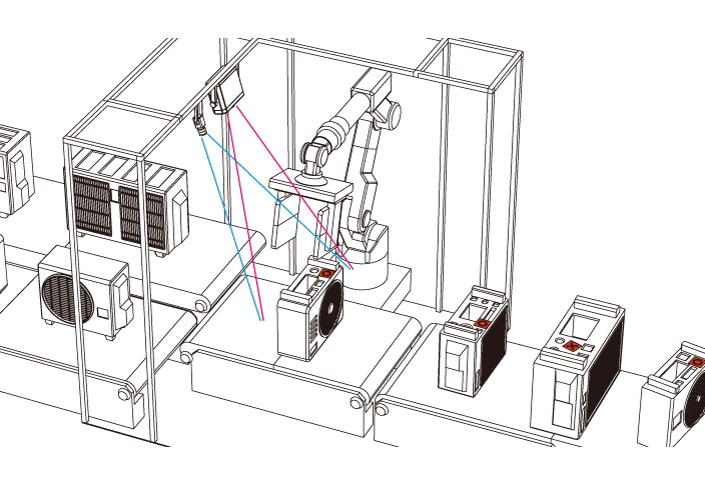
ロボットシステム構成
TriMathを採用したビジョンロボットシステムをご提案・ご提供いたします。
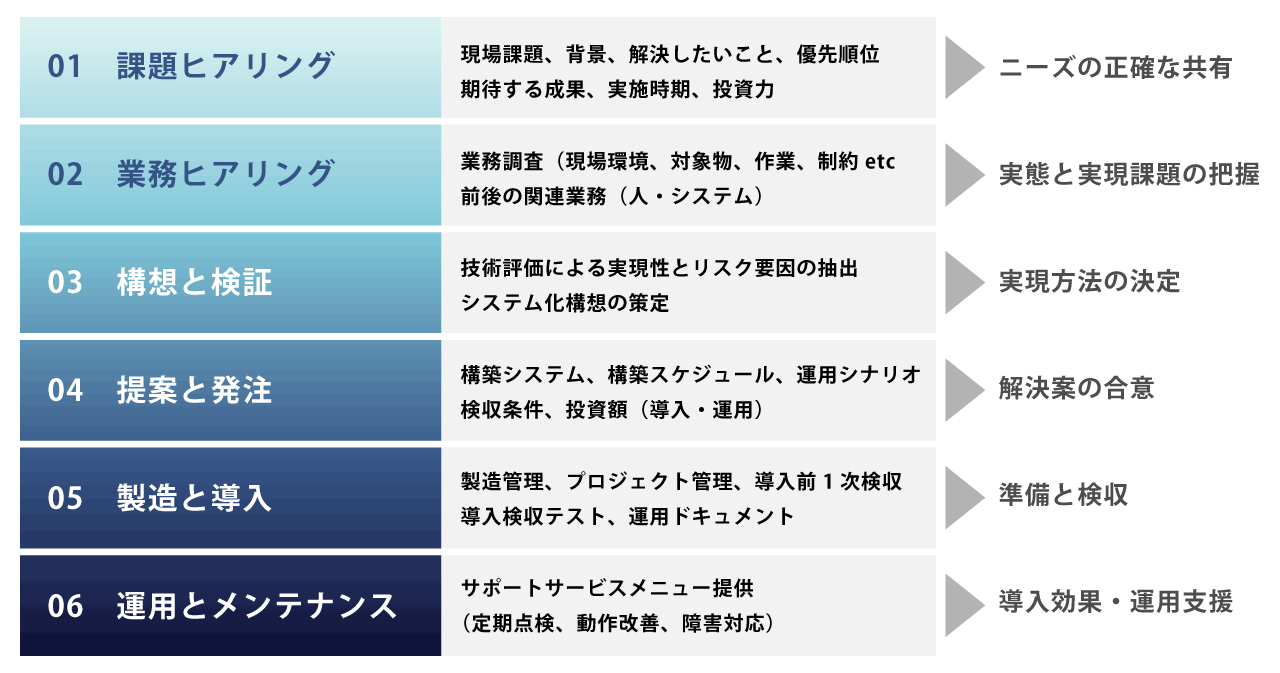
導入プロセス
関連製品・サービス

関連記事





関連記事
材料袋のデパレタイズロボット