製品・サービス
袋 ピッキング・デパレタイズ
■業界:物流
モノづくりの原料となる粉や肥料などの袋は、袋のサイズは同じでも、積み上げられた状態では袋の形状が変わるため、その違いを認識することが難しく、ロボットの活用には技術的な課題が多くありました。本事例は、粉物の搬送に欠かせない袋体のピッキング・デパレタイズを自動化した事例についてご紹介します。
課題
【業務課題】
・作業量が多く長時間に及ぶ単純作業の低減
・ラインの省力化・自動化
・慢性的な人材不足の改善
・不定形物のピッキング
・袋の積載状態の認識
解決ポイント
マスターレススキャン技術
【課題】不定形物のピッキング
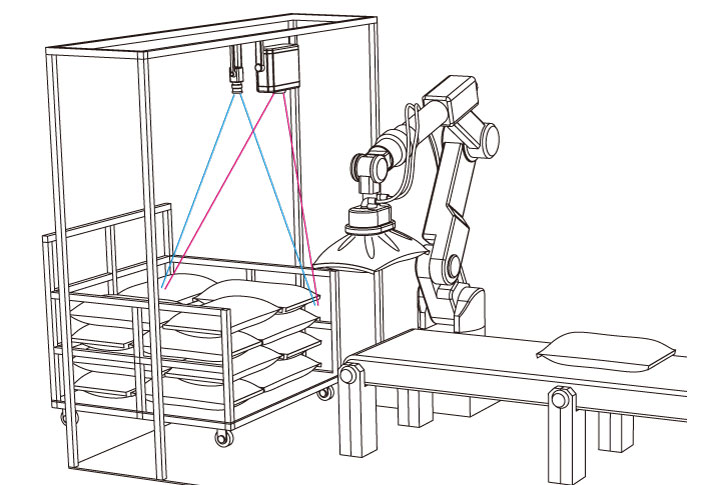
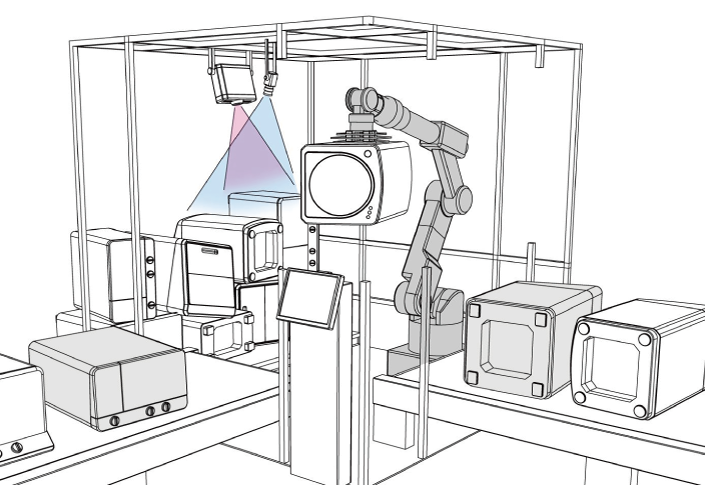
物流センターに搬送されてくる袋体は、コンテナに1段4個~6個で3段から5段に積み上げられた状態で搬入されます。積載状態により袋の形状が歪むため、従来のマシンビジョンシステムでは対応が難しく、人手により作業するしか方法がありませんでした。ビジョンロボットシステムTriMath* は、プロジェクタにより特殊パターンを対象物に投影し、そのパターンを撮像することで3次元情報を取得すると共に、独自のマスターレススキャン技術により、袋体の荷姿状態を解析します。その結果得られたピッキングに必要な座標情報をロボットに出力し不定形物のピッキングを実現します。従来のシステムで必要だった対象物の事前の情報登録が一切不要なため、導入・運用コストの削減も可能となりました。
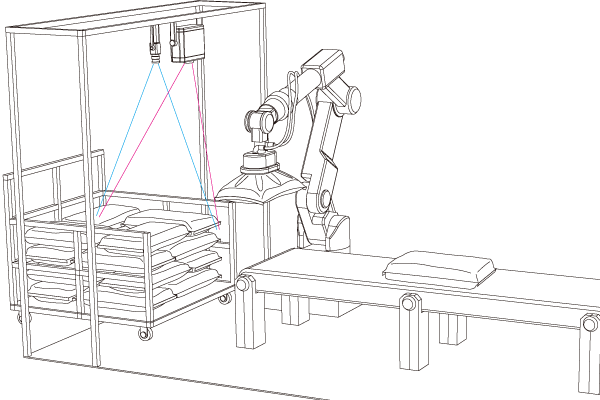 図1. マスターレススキャンにより、袋体の荷姿状態を解析
図1. マスターレススキャンにより、袋体の荷姿状態を解析
※TriMathは東京エレクトロンデバイスが開発した不定形物デパレタイズロボットシステムです。
ロボットのピッキング姿勢制御
【課題】袋の積載状態の認識
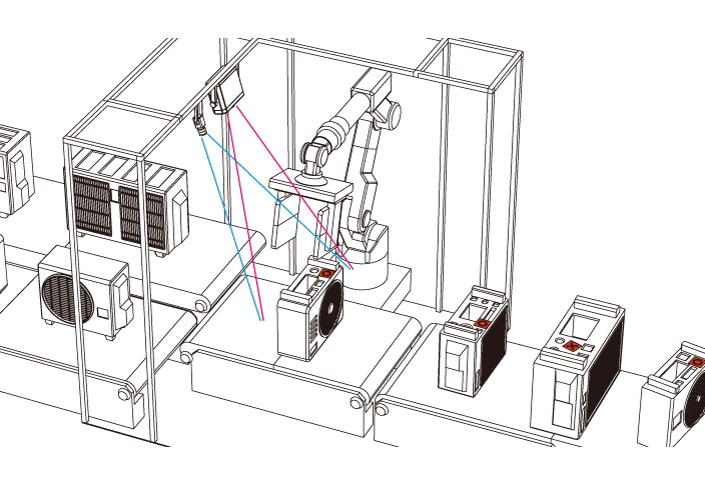
TriMathは対象物や作業内容により最適なロボットハンドを選択可能です。ロボットハンドの種類には大きく把持タイプ、吸着タイプ、磁力タイプがありますが、袋体を扱う場合には吸着タイプが適しています。しっかり吸着するためには、ロボットハンドを吸着面に対し、水平に当て、吸引力が逃げないようにする必要があります。TriMath は袋体の積載状態を認識することで、袋体の傾きを認識しロボットハンドを傾きに合わせアプローチするようロボットを制御します。こうすることでピッキングミスを減らし、袋体の落下の可能性も低減します。また、袋体に印字されているロゴや色の違いを認識することで、さまざまな仕分け基準を組み込むことも可能です。
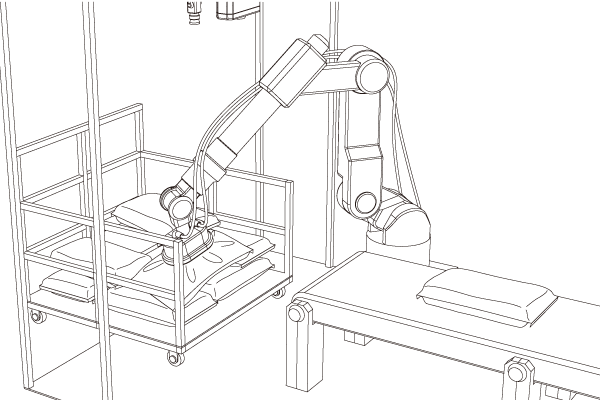 図2. 袋体の傾きを認識しロボットハンドで吸着
図2. 袋体の傾きを認識しロボットハンドで吸着
紹介動画
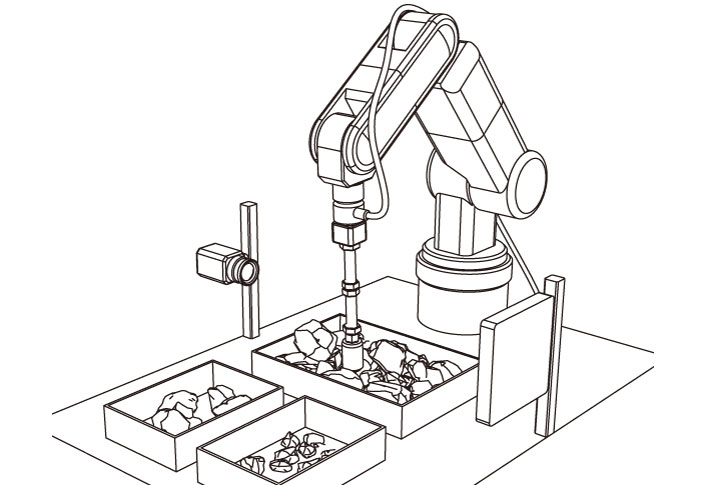
原料(袋)ピッキング・デパレタイズ
乱雑に積まれた袋をマスターレスで正確に認識、ピッキングし指定場所に仕分けます。
関連製品・サービス
関連記事






関連記事
袋 ピッキング・デパレタイズ