製品・サービス
ピッキングロボットの位置補正
■業界:自動車
製造現場におけるライン作業は、部品投入から製品完成までの時間とコストをいかに圧縮するかが重要です。特に加工時間の短縮はリードタイム改善に大きな効果をもたらすため、非常に需要な改善要求です。本事例では、大型部品をラインに投入するために、精密な治具と人手を必要としていた車の生産ラインにおいて、マシンビジョンと多関節ロボットを活用し、「正確に掴む」工程をロボットが行うことで、ライン投入作業を自動化した事例をご紹介します。
課題
ピッキングロボット「正確に掴む」工程で時間を圧縮
【業務課題】
・精密な治具が必要
・人手による治具へのセット
・部品の正確な位置検出
・部品の傾斜に合わせて掴む
解決ポイント
計測データから位置補正
【課題】部品の正確な位置検出
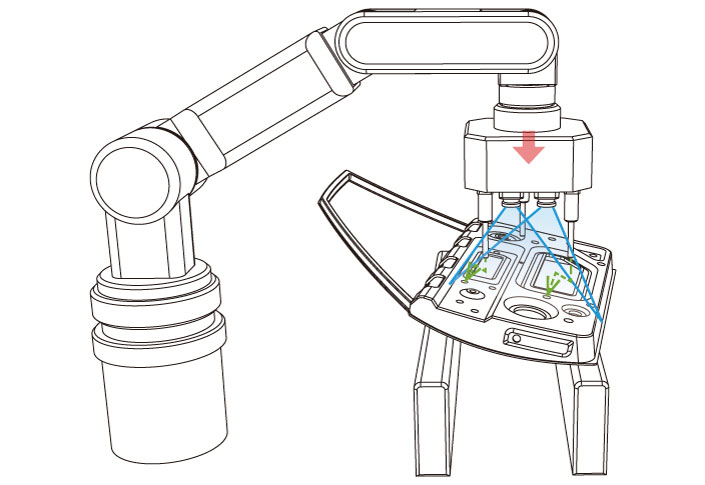
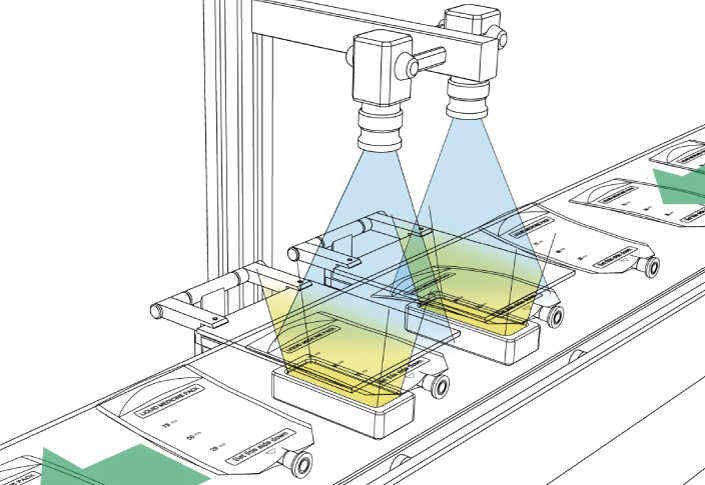
ドアを掴むロボットのヘッドにカメラ2台と照明を装着し、マークとなる特徴のある部分の撮影と、ステレオカメラ法* でカメラからドアまでの高さを測定します。複数個所計測することで、ドアをつかむ位置と傾きを計算します。同時にティーチング時との位置の違いを検出し、ロボットが位置移動を行う際の補正値を計算します。
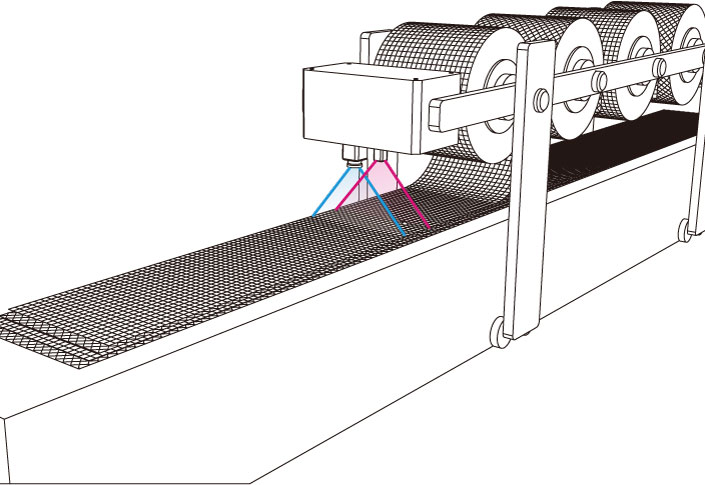
* ステレオカメラ法による高さ計測は、直線レーザーを使用した光切断法による高さ計測にすることも可能です。
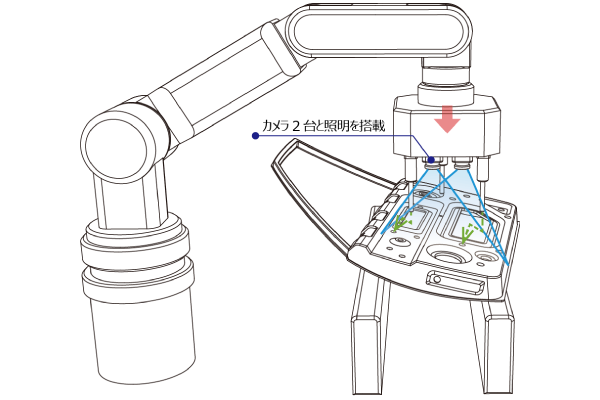 図1. 部品の高さ・位置・傾きを計算
図1. 部品の高さ・位置・傾きを計算
補正値によるロボット制御
【課題】部品の傾斜に合わせて掴む
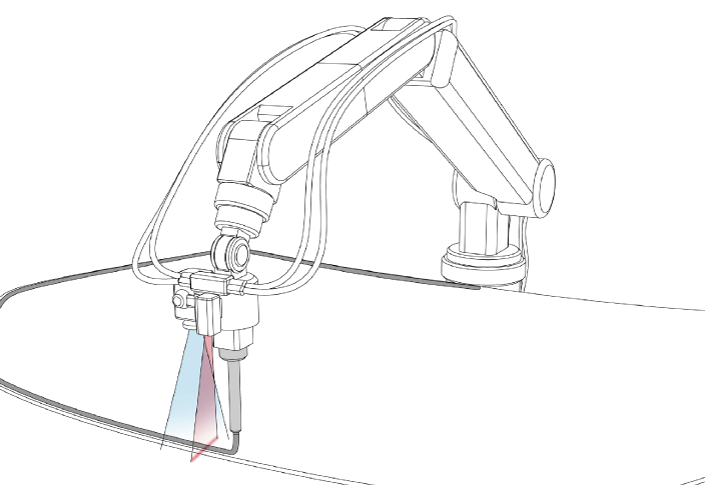
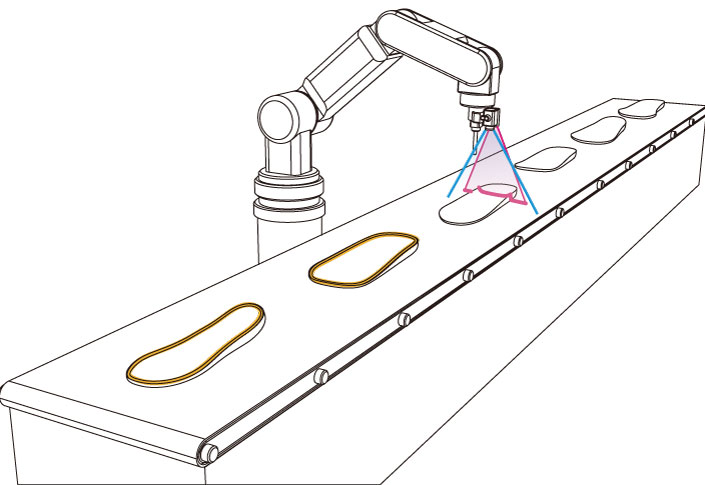
補正値とロボット* のティーチングデータを合成し、ロボットのヘッドが、掴む面に対して垂直になるよう制御できるため、傾斜が異なって置かれた場合でも、正確にドアを掴むことができます。画像処理による補正値算出でロボット制御を行うことで、治具と人手に依存した部品投入作業を簡素化し、自動投入化させたことで安全を確保できました。
*ロボットは、各社の多軸ロボットに対応可能です。
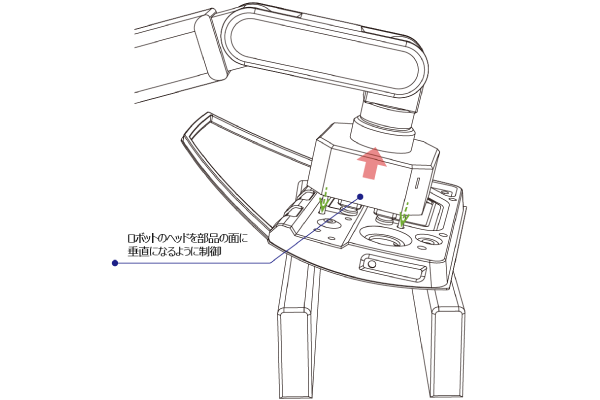 図2. 傾斜が異なって置かれても正確にピックアップ
図2. 傾斜が異なって置かれても正確にピックアップ
~ 人手に頼っている現場作業を「効率化」「省人化」「自動化」したい方におすすめ ~
【必読!モノづくり現場 12の課題解決事例集】ダウンロード

関連製品・サービス



関連記事





関連記事
ピッキングロボットの位置補正