- HOME
- 【DX対談】今超えるべきビジョンロボットの壁と将来の展望 ~第2話 シュマルツ 株式会社~
【DX対談】今超えるべきビジョンロボットの壁と将来の展望
~第2話 作業の重責を担うロボットハンドメーカーの今~
工場内で生産されるさまざまな製品を吸着し自動搬送する機械や、人手で行われる材料投入や物流搬送をサポートするハンドリングシステム、加工前の材料を吸着・保持するクランプシステムによって製造業の生産性向上・コスト削減に貢献する自動・手動搬送用およびクランプ用真空機器メーカーのシュマルツ 株式会社に、ビジョンロボットシステムへの取り組みを伺いました。

シュマルツ 株式会社
オートメーション営業部
中澤 龍麿 氏
・2018年 シュマルツ株式会社に入社
オートメーション営業部配属、現在に至る
インタビュアー
森川 健一(東京エレクトロン デバイス株式会社 設計開発センター第二開発部部長/PB事業推進室室長)
ビジョンロボットシステムについての取り組み
―――― ”段取り替え”の手間を削減するロボットハンド 真空グリッパー
 森川 ビジョンロボットシステムにおけるシュマルツ社の製品としては、どのようなものがありますか。
森川 ビジョンロボットシステムにおけるシュマルツ社の製品としては、どのようなものがありますか。
中澤氏 当社では、1つのハンドで複数のワークを吸着・搬送することが可能な汎用ハンド「真空グリッパー」をはじめ、モジュール式で組み換え可能なハンド、協働ロボット向けの真空機器と接続部品がセットになったロボセットなど、効率良い搬送やセットアップを実現するさまざまなロボットハンドをラインアップしています。
「軽量真空グリッパーFQEシリーズ*¹」は、 ワークに当たっている部分だけで吸着ができる汎用的でさまざまなワークを掴めるグリッパーです。「ISO/TS 15066」に準拠したデザインになっていますので、基本的に人に衝突しても怪我をしにくい丸みを帯びたデザインで、樹脂でできているという点が特徴になります。吸着面は吸着パッドタイプと、スポンジタイプの2種類を用意しており、スポンジタイプの可搬重量は最大35kgですから、10kg~15kgの段ボールであっても安定した搬送が可能です。
森川 吸着面の使い分けについて教えてください。
中澤氏 吸着面がスポンジタイプの場合は、吸着したときにワークがあまり変形しないものや、表面に少し凹凸があるようなものに適しています。木材など硬いワークを吸着パッドタイプで吸着する場合には、エアが少し漏れてしまいますが、スポンジタイプであれば、形状に馴染んでしっかりと把持することができます。対して、柔らかい段ボールや袋製品など、スポンジでは追従が難しい曲面や凹凸のあるワークの吸着搬送は、吸着パッドタイプの方が適しています。

●スポンジタイプ

●吸着パッドタイプ
森川 ワークの表面が全パッドにいきわたらないことがあっても吸着できるのでしょうか?
中澤氏 スロットルバルブ*²(絞り弁)を搭載しているため、ワークが当たっていない部分からのエア漏れを制限し、グリッパー内部の真空圧を維持することができます。
森川 このタイプの吸着パッドが使われてる現場が多い印象があります。
中澤氏 はい。そのままロボットに取付けて使えますし、ユーザー側で用意するハンドの点数を抑えることができたり、インテグレーター側も設計・製作の手間が掛からないという点が選ばれるポイントかなと思います。
●真空グリッパー FQEシリーズ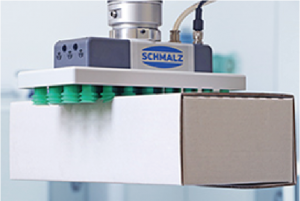
―――― 米袋など大型の袋ワーク搬送 「袋吸着用サックグリッパー SG」
中澤氏 パレタイズ、デパレタイズ関連ですと、TEDさんでも使用いただいている袋物の搬送に適した袋吸着用サックグリッパー SG*³という製品があります。先ほどお話しした、段ボールよりも変形しやすくて、ある程度の重量もあり、なおかつ通気性が高いワークに適したグリッパーです。吸着面にシーリングといわれるスポンジが周状についていて、真ん中に袋の引き込みを防止するような補助フレームが入っています。上側にある真空エア接続口の径が大きく吸着面も広いため、吸込み量の多い真空発生器(真空ブロワなど)と組み合わせて、流量を絞らずに通気性のあるワークでも吸着することができます。
●袋吸着用サックグリッパー SGシリーズ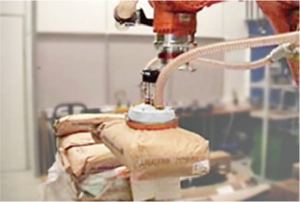
真空ブロワは、電気式の真空発生器です。通常のエジェクター方式と比べると真空圧はそこまで上がりませんが、吸い込みの流量が非常に多いため、変形してエア漏れが起きる袋物や通気性のあるワークの搬送に適しています。
森川 先日、シュマルツ社のハンドを使用して、20~30kgあるクラフト紙袋を吸着する案件がありましたが、クラフト紙袋の吸着搬送は難しい部類になりますか。
中澤氏 そうですね。クラフト紙袋はワークの変形もありますし、通気性もあるため、エアが漏れやすい性質で吸着搬送は難しい部類です。最適な吸い込みの流量の真空発生器とハンドの形状の選定が非常に重要になってくると思います。
森川 エジェクターによる真空圧力で持ち上げるのは難しく、ブロワによる大きな流量で引っ張り上げるということになりますか。
中澤氏 ワークの性質(変形具合、通気性)や搬送条件にもよりますが、10kgくらいまでのワークであればエジェクターでも吸着可能な場合もあります。ただ、20~25kgとなるとブロワでないと難しいですね。
森川 グリッパー内部にある補助フレームの取付位置の深さを変更したり、グリッパーを2個使いにしているユーザーもいますが、一番安定する使い方はありますか。
中澤氏 正直、安定というところだけでいうと、なるべく補助フレームを深くして引き込みの量を多くした方が安定した搬送ができます。
森川 あえて袋を巻き込ませるということですね。
中澤氏 はい。クラフト紙袋など通気性のあるワークの場合は、中の粉やペレットを一緒に巻き込んで吸ってしまうというのが一番安定します。ただし安定する反面、ワークにしわが残ったり、吸着を離したときに上面が盛り上がったりしますので、許容範囲と搬送の安定性のちょうどいいバランスを見ながら、この補助フレームの位置を変えていくというのがいいと思います。
―――― 人間の手のような繊細な搬送「フィンガーグリッパー OFG」
森川 把持が難しいデリケートなワークはどうでしょうか。
中澤氏 人間の手を模して設計されたロボットハンド「フィンガーグリッパーOFG*⁴」は、4本のフィンガー内の圧力を制御することによって開閉動作を行い、手で物をつまんだり掴んだりするように、デリケートなワークを優しく把持することができます。標準仕様の他に、ハンド全体がFDA*⁵の規格に準拠した材質で構成されており、全体を丸洗いできる「高衛生モデル」があります。フィンガー部分はシリコーンゴムで、最大ワーク重量は1kgほどです。実際に把持できる重さはワークの形状にもよりますが、先端は固めで、しっかりと安定した搬送ができるようになっています。コントロールユニットで把持する強さや、どれくらい開くかといった制御ができるので、柔らかい食品などのワークを傷つけないように搬送することができます。
●フィンガーグリッパー OFG
森川 爪部分のストローク範囲と、ワークに対してかける把持力との関係はどのようになるのでしょうか。
中澤氏 ストロークの設定になります。力覚センサーが入っているわけではないので、どれくらいの力で把持するかというよりも、供給する圧力を調整して、狙った位置まで閉じるようにするなどの制御が必要になります。
森川 ワークが小さいほど、大きなストローク設定にするのですね。
中澤氏 内側に向かって閉じるだけはなく、フィンガーの角度というのも簡単に変えることができますので、外径把持の他に、外側に開きながらワークを把持する内径把持や、平行に4本のフィンガーが閉じるような把持も可能です。また、吸着搬送になりますが、バラ積みからのピッキングに特化した真空パッド「SVEシリーズ」もあります。
森川 バラ積みに特化している部分というのはどの辺りになりますか。
中澤氏 コンテナの中にバラ積みでさまざまな姿勢で積載されているワークを確実にピッキングできるように、パッド形状が深いベル型で、吸着面の形状に追従してパッド側が変形しやすいようなつくりになっています。
森川 単純に薄くて柔らかい素材を採用しているということではなさそうですね。
中澤氏 そうですね。どうしても無理な姿勢で吸着することになりますので、ポリウレタンという耐久性と柔軟性に優れたゴムを使っています。金検対応シリコーンゴムタイプのものもありますが、こちらは食品などの衛生管理が必要なワークに使われるケースが多いですね。
森川 シリコーンタイプについてもパッド側が変形して吸い付くという理屈は同じですか。
中澤氏 同じですね。形状も全く同じです。
●バラ積みピッキング用吸着パッド SVE

●箱からスプレー缶をピックアップ
●特長・利点
ビジョンロボットシステムの課題
―――― ロボットハンドメーカーの視点で感じているビジョンロボットの課題はありますか。
中澤氏 ビジョンロボットシステムとして、そしてロボットハンドメーカーとして、下記の課題が挙げられます。
①ワークの品種の多さ
1台のロボットで多品種のワークを扱ったり、複数工程での作業に汎用的に使いたいというニーズが見受けられます。そうするとロボットハンドの段取り替えに手間が掛かったり、システム構築が複雑化してしまうという課題があります。
②段ボールのパレタイズ・デパレタイズ
量販店やスーパーですぐに開梱して陳列しやすいよう、ミシン目が入っていたり、ホットメルトで少し止めてあるだけのものなど、従来にはなかった扱いづらい梱包形態のものが増えてきています。
森川 ワークの品種が多いとハンドの段取り替えやシステム構築が複雑化してしまうという課題への取り組みについて教えてください。
中澤氏 そのような課題に対する取り組みの1つが「オートツールチェンジャーMATCH*⁶」です。ドイツのZimmer Group社というメカチャック式ハンドメーカーと共同で立ち上げたブランドになりますが、このMATCHにより、これまで当社にはなかった「掴めるハンド」をラインアップすることができました。
●オートツールチェンジャーMATCH

森川 やはり、本製品もエア駆動になりますか。
中澤氏 当社で用意している真空発生器はエア駆動と電気駆動の2種類があります。例えば、小型の電動ポンプ(コボットポンプECBPi/ECBPMi)は電気駆動になります。
ユーザーやインテグレーターが色々なメーカーのものをセットアップしていた従来の形から、エンドエフェクタの部分と一体になった状態でツールチェンジャーを提供できるというのが「MATCH」というシステムの1つのメリットとなっています。
森川 チェンジングの動力源は、エアになりますか。
中澤氏 チェンジングの動力にはエアも電気も使わないのが大きな特徴です。ホットプラグ式のため、ロボットの電源を落とさずに自動でツール交換が可能です。手動交換時も道具不要で片手で簡単に交換が可能です。また、交換ツールを保持する専用ステーションにロック機構が設けてあり、ロボット動作との組合せでメカ的に脱着できる仕組みになっています。
森川 動力のためのエアや電力の供給が不要なんですね。この機構は初めて見た気がします。
中澤氏 そうですね、このタイプっていうのはあまり見ないかなと思います。
森川 これは、Zimmer Group社さんがもともと持っていた技術なんでしょうか。
中澤氏 これは今回のMATCHというシステムのために共同で開発したものになります。
森川 基本的には協働ロボット用なんですね。産業ロボット用はあまり想定してないのでしょうか。
中澤氏 まだ産業ロボット用は想定しておりません。もちろん需要はあると思うんですけれど、産業ロボット用ですと既存のツールチェンジャーメーカーがすでにさまざまな製品を出しているため、他社と差別化できてこれから需要が高まってくる協働ロボット用のツールチェンジャーを出すことになりました。仕組みとしては産業ロボットでも使えるんですけれども、適合しているのは協働ロボットですね。
森川 吸着ハンドの話に戻らせてください。代表的な適用事例に物流倉庫などにおける段ボール箱の搬送があると思いますが、最近はさまざまな開梱仕様のものが増えていて、上面だけを吸着すると壊れる場合があると思うのですが、そのような課題を解決するためのソリューションはありますか。
中澤氏 そうですね。そのような課題に対する取り組みの1つが「パレタイジング・デパレタイジング向け真空グリッパーシステム*⁷」です。この真空グリッパーシステムは、多様な段ボールのパレタイジング・デパレタイジングに対応する「ロボットハンド」一式を提供するサービスです。標準的な段ボールから、課題となっている上面把持だけでは壊れてしまう段ボールまで、それぞれに最適な仕様を選定し、設計・製造まで一貫してお任せいただくことでお客様の工数削減に貢献します。ミシン目入りの段ボール等上面が弱いワークの場合、エアで伸縮する側面把持用グリッパーを追加することで安定した搬送が可能です。また、標準化かつモジュール化したパーツによって構成されるため設計・製作期間を短縮できます。
●パレタイジング・デパレタイジング向け真空グリッパーシステム
今後の展望
―――― 今後の展望を教えてください
中澤氏 当社の日本法人では設計技術の人材を増やしたり、国内で部品を加工してくれる協力会社を見つけたりと、従来の部品供給だけにとどまらず、国内でも設計・製作が出来るような体制を少しづつ整えております。今後、日本の市場にマッチしたハンドの供給により力を入れていきたいと思っています。
TEDへの期待
―――― 自動化を実現したい現場作業やアプリケーションを特定し、ロボットやビジョン、そしてシュマルツ社が提供されているようなハンドなどの特長を高度に擦り合わせたシステムの提供に主眼を置いている我々のような存在に対して、ロボットハンドメーカーのシュマルツ社として期待されることは何でしょうか。
中澤氏 今自動化が進んでいるのは大手のユーザーが多いですが、ロボットを今まで導入されていないユーザーなど、これから導入を増やしていく作業現場には、システムとして使いやすいものや、納入した後にユーザー側で管理やメンテナンスができるようなシステムがあると良いかなと思っています。
我々も展示会やお問い合わせで、「こういうワークを自動で搬送したい」というご相談をいただくことがあります。実際にテストをして把持自体は可能だったのですが、納入するにあたってどうしても、コストの問題や、導入するハードルが高いケースがかなりあると感じました。ユーザーが導入しやすいようなシステムがあると、我々ハンドメーカーとしても裾野が広がっていくというのは感じています。
TEDさんはロボットセンターも立ち上げられているので、ロボットとビジョンを使っての検証は是非当社でも活用させていただきたいですね。実際にユーザーから、「搬送はできるけどロボットでビジョンと組み合わせた時に、実案件に結びつくのがなかなかイメージができない」というお声もいただきます。SIerで実際にロボットを使ってテストをしていただくというケースもありますが、TEDさんの方でもビジョンのシステムと組み合わせた導入前のテストなどを、一緒に協力しながらやらせていただけると良いかなと考えております。
森川 これまではTEDのほうからハンド製品の選定や評価をお願いしてばかりでしたが、逆にシュマルツさんのユーザーがお持ちの課題をTEDに持ち込んでいただいて、双方で協力しながらその課題を解決していくということですね。我々にとっても非常に嬉しいご提案ですし、これまで以上に密に連携させていただければと思います。
*¹ 軽量真空グリッパー FQE
http://www.schmalz.co.jp/products/vacuum-gripper/vacuum-gripper-fqe.html
*² スロットルバルブ
http://www.schmalz.co.jp/products/vacuum-components/valve/check-valve.html#c14134
*³ 袋吸着用サックグリッパー
http://www.schmalz.co.jp/products/vacuum-gripper/sack-gripper-sg.html
*⁴ フィンガーグリッパーOFG
http://www.schmalz.co.jp/products/vacuum-gripper/finger-gripper-ofg.html
*⁵ FDA:アメリカ食品医薬品局、Food and Drug Administrationの略称
*⁶ オートツールチェンジャーMATCH
http://www.schmalz.co.jp/products/vacuum-gripper/match.html
*⁷ パレタイジング・デパレタイジング向け真空グリッパーシステム
http://www.schmalz.co.jp/products/vacuum-gripper/palletizing-depalletizing-gripper.html
著作権・商標について
本誌に記載されている商品名、会社名、商標およびサービスマークは、各社の商標または登録商標であり、各権利者に帰属するものです。
本誌の掲載内容について、当社または第三者の知的財産権(著作権・意匠権・特許権・実用新案権・商標権・ノウハウ・アイデア等が含まれますがこれらに限定されません)に基づくいかなる権利も許諾するものではありません。また、掲載内容を著作権法上の無断利用の例外を除き、著作権者に無断で複製、送信、頒布、改変、翻訳等することは著作権法違反となります。
当社WEBサイトの利用規約は以下をご参照ください。
https://www.teldevice.co.jp/kiyaku.html
【DX対談シリーズ】今超えるべきビジョンロボットの壁と将来の展望
こちらの記事も読まれています



