- HOME
- 【DX対談】今超えるべきビジョンロボットの壁と将来の展望 ~第1話 株式会社デンソーウェーブ様~
【DX対談】今超えるべきビジョンロボットの壁と将来の展望
~第1話 多様化する市場ニーズに向き合うロボットメーカーの挑戦~
これからの現場に求められるビジョンロボットについて、開発に携わる各社企業の技術視点から、現状課題、今後の展望を伺います。今回は、組立作業用のロボット分野でのマーケットリーダーであり、信頼性の高い品質と、高性能かつ豊富なバリエーションでさまざまなニーズに対応し、多くのお客様に自動化推進のソリューションを提供することで、世界中の「モノづくり」に貢献されている株式会社デンソーウェーブ様に、多様化する市場ニーズに対応するための取り組みについてお伺いしました。

株式会社デンソーウェーブ
ソリューション事業部 FAシステムエンジニアリング部
澤田 洋祐 氏
・1985年 日本電装株式会社(現:株式会社デンソー)に入社
・1992年 産業用ロボットの事業化メンバーに参画。開発、営業、カスタマーサポートを行う
・2004年 デンソーロボット欧州販売体制構築のためDENSO EUROPE B.V.(オランダ・ドイツ)に出向
・2011年 帰国後、株式会社デンソーウェーブに出向し産業用ロボットの商品企画を担当
・2020年 商品企画+アプリケーション開発+カスタマーサポート+フィールドサービスを統合した新組織を担当し、現在に至る。
インタビュアー
森川 健一(東京エレクトロン デバイス株式会社 設計開発センター第二開発部部長/PB事業推進室室長)
ビジョンロボットシステムについての取り組み
 ―――― デンソーウェーブさんは、さまざまなビジョンメーカーさんと積極的に組まれている印象があります。その辺りの狙いや、現状注力されているポイントはどのような点でしょうか?
―――― デンソーウェーブさんは、さまざまなビジョンメーカーさんと積極的に組まれている印象があります。その辺りの狙いや、現状注力されているポイントはどのような点でしょうか?
澤田氏 ロボットが取り扱う対象物には、定型物、不定形物、反射物など物体の「質」という視点と、バラ積みなのか、純正列なのかなどの物体の「状態」という視点があります。それらをマトリックスにして整理し、どこをどの製品・技術で埋めていくかということを考えて進めています。
そうすると1種類のビジョン製品・技術では解決できないため、さまざまな製品とのコラボレーションが必要になってきます。ビジョンの世界の進歩はとても早いものですから、我々単独でやるというよりは、パズルを埋めるごとにパートナーを開拓して一緒にやっていくというやり方をしています。
―――― 自社の製品として取り組んでいる領域はありますか?
澤田氏 唯一、二次元のピッキング用途に特化した画像処理アプリケーション,EVP2*¹は内製にしています。二次元のビジョン市場の半分は検査、残り半分が認識、計測、位置決めと分かれています。私たちがターゲットとしているのは、位置決め部分のロボットによるピッキングで、ここに特化し必要な機能だけに絞ることで、「簡単」で「安価」に利用できるアプリケーションを提供しています。
この画像処理アプリケーションは、フレキシブルフィーディングシステムと連携し、バラ積みのワークを振動で平たくしてからピッキングすることで、三次元のピッキングにするよりも、安価でサイクルタイムを短くすることができます。
―――― ビジョンという観点で、何か新しい独自の取り組みはありますか?
澤田氏 画像ではありませんが「ロボットの目」という観点で、当社はAI模倣学習*²ということもやっています。これはどちらかというと、画像ありきというよりはマルチモーダルの中のひとつの情報として映像を入れているというものになります。例えば、計量作業やハーネスを組み立てる作業などに応用しています。ルールベースでのプログラムには難しい作業を、学習して、回避させるということなのですが、作業を教えるというひとつのサイクルの中で、最初から最後までずっと録画しているようなイメージです。
森川 本当に幅広く実践されているんですね。
ビジョンロボットシステムの課題
―――― ロボットメーカーの視点で感じている現在のビジョンの課題はありますか?
澤田氏 高性能な3Dマシンビジョンが、広く普及していないのは以下の要因があると考えています。
・対象物が限定されること
-
- 認識率が低い
- CADベースまたは定型物の認識のみ
- カメラの種類が少ない
・操作や設定が難しい
・価格が高い
つまり、コストパフォーマンスが低いからだと認識しています。こうした課題を解決していくことが必要です。
● 3Dマシンビジョンの困りごととその解決

 森川 「対象物が限定される」という点についてもう少しお話を聞かせていただけますか。
森川 「対象物が限定される」という点についてもう少しお話を聞かせていただけますか。
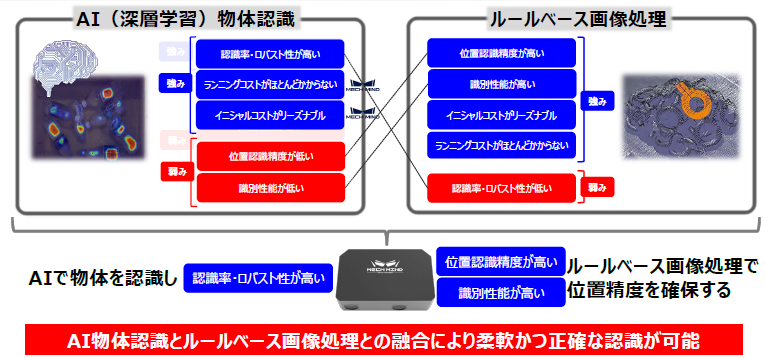
澤田氏 はい。この問題を解決するには、従来のモデルマッチングをルールベースと呼ぶならば、ルールベースとAI、ディープラーニングの両方をうまく使いこなすことが必要です。ルールベースとAIは長所と短所がほぼ逆転していて、ルールベースは位置認識性能も識別性能も高いですが認識率やロバスト性は低いです。
逆にAIは認識率はとても高いが、位置認識、識別性能が低い、つまり、ふわっと見ることはできるが、きっちりとは見れない、精度の必要な位置決めには向かないのです。このような関係をお互い相殺できるように、AIでなんとなく物体を認識して、そのあとルールベースで識別したり、位置精度を出すようなハイブリット型でうまくいっているケースが出てきています。
●AI(Deep Learning)とルールベースのハイブリット認識
森川 今のお話は、バラ積みなどの場合に、どのような姿勢でどの位置にあるのかをAIでざっくりと把握し、そこからルールベースで識別するということかと思いますが、実例はありますか?
澤田氏 デパレタイジングの実例をご紹介します。通い箱は使っているうちに変形や変色するため、モデルで登録できませんでした。そこで通い箱自体をAIで認識させて、その後、箱の縁の部分のモデルをマッチングさせて位置精度を出すのはどうかと考えました。通い箱を把持することを考えると、大きく位置ずれを起こすとグリッパーの爪が通い箱と接触してしまうため、AIで通い箱を認識してから、通い箱の縁の部分もモデルマッチングして、位置決めをするというやり方です。
●Deep Learning + ルールベース画像処理による「通い箱」の認識
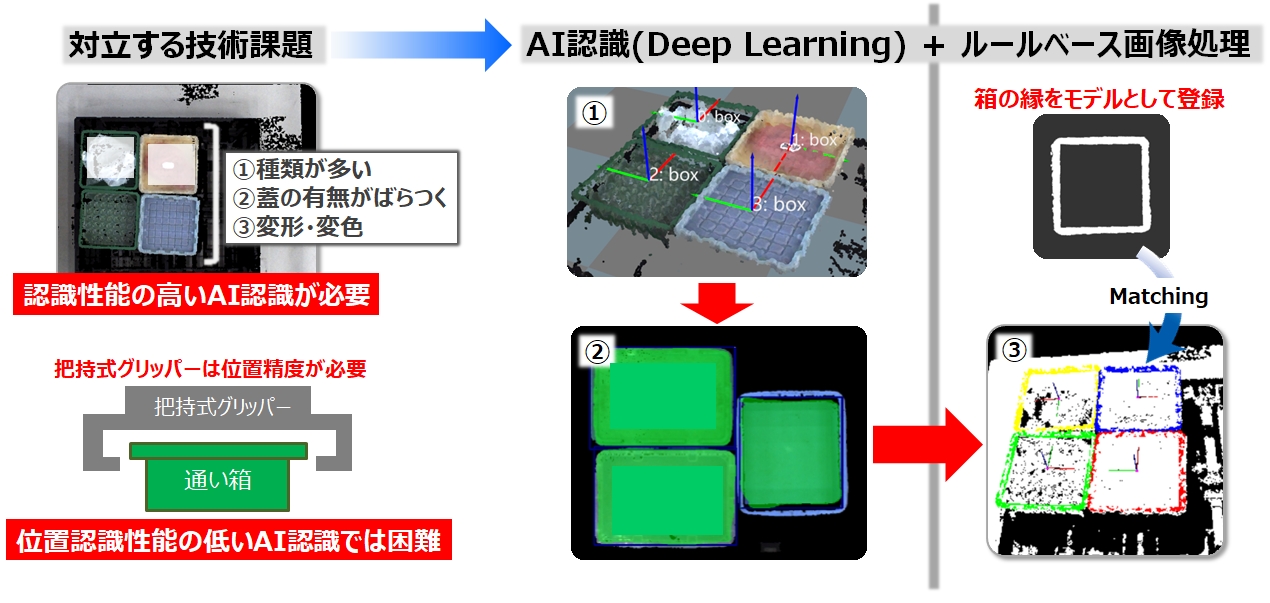 (引用:デンソーウェーブ社 Mech-Eye Industrial 3D Camera 製品説明資料)
(引用:デンソーウェーブ社 Mech-Eye Industrial 3D Camera 製品説明資料)
森川 こうした取り組みの過程で感じている他の課題認識はありますか?
澤田氏 AIをやっているとFA業界はビジョンの依存度が高すぎる、いわゆる眼に頼りすぎていると感じています。人間は眼の依存度はそれほど高くなく、例えば、机の上のものを取る場合、1回くらいしか見ていないはずです。そのあとは、モノとの距離感などは経験値と、掴んだ時の手触りで把持力や位置を決めていると思います。
ですから、ハッティックスの接触センサーですとか、他のセンサーと混ぜないとビジョンの依存度が高すぎると思います。ロボットとAIの組合せには、いろいろな種類のセンサーを取り入れて、目と腕、指の部分のバランスを取る必要があると思っています。そのため、当社では今回グリッパーの内製化も進めています。
森川 モラベックのパラドックス*³という定説がありますが、3歳児がモノを取る場合、それほどそのモノを凝視しているわけではなく、いろいろな感覚を総動員して2、3回程度の試行で必ず取れるようになります。必ずしも眼だけに頼っているわけではないですね。
澤田氏 そもそも、人間自体が精度が出ない生き物ですし、トライアンドエラーをうまくやっています。ロボット自身も、センサーフィードバックをモーションループに入れて、リアルタイム層でもう少し補正をすれば、やれることが多くなるのではと思います。
今後の展望
―――― ビジョンロボットの将来像をどのように描かれていますか?
 澤田氏 当社は、ベッコフのIPCを採用した新しいロボットコントローラ「RC9」*⁴を出した際に、「協調領域」と「競争領域」という言葉を使い始めました。日本市場のFA業界は競争が多すぎます。各社が同じものを競って作っている印象です。「協調領域」と「競争領域」を先に決め、ここは戦わずして、あるものを使う、仲間づくりをするなど協調していくべきという領域と、ここはロボットメーカーとしての付加価値なので戦いましょうという領域で考えています。
澤田氏 当社は、ベッコフのIPCを採用した新しいロボットコントローラ「RC9」*⁴を出した際に、「協調領域」と「競争領域」という言葉を使い始めました。日本市場のFA業界は競争が多すぎます。各社が同じものを競って作っている印象です。「協調領域」と「競争領域」を先に決め、ここは戦わずして、あるものを使う、仲間づくりをするなど協調していくべきという領域と、ここはロボットメーカーとしての付加価値なので戦いましょうという領域で考えています。
年々ロボットに期待されていることが大きくなり、求められる作業は高難度になってきています。こうした状況に対応していくには、「協調」と「競争」をしっかり分けるというやり方が良いと考えています。
森川 ORiN2 SDK*⁵やRC9はオープンなコンセプトで展開されていますが、他社製品との連携は実際いかがですか?
澤田氏 3月に開催した展示会では1台のRC9コントローラに電子カムを入れて3台のロボットと1台の他社製スライダー電子カムで1msの同期制御しましたが、スライダーがEtherCAT採用だったので、あたかも自社製の付加軸のように制御できました。EtherCATはETG会員数が6,000を超えています、言い換えれば6000社が持つデバイスと繋ぐことができます。
これは、私たちロボットメーカーの視点だけでなく、お客様視点でも、とても有利だと思います。ロボットコントローラをオープンにしたことによって、今までは自社の開発部署によって実装しなければならなかったことが、システムインテグレータなどのロボットユーザでも実装できるようになりました。
TEDへの期待
―――― ビジョンロボットの将来像をどのように描かれていますか?
澤田氏 御社の考え方は、当社に似ていると感じています。御社に期待することは、ビジョンが主の場合でも、ロボットが主の場合でも、同じプラットフォームで、融合するような役割でしょうか。ビジョンが主体のアプリケーションでしたら、御社のプラットフォームの上に、我々のロボットを載せてもらうことも可能にしたいですし、逆に我々のロボットが主として設備が成り立つ場合、ソフトとカメラだけご提供いただいて移植できるような世界観が良いですね。そういったことができると、統合化が進んでエンジニアリング工数の低減にも繋がると思います。
森川 ありがとうございます。そういった展開をしていきたいと思います。本日はありがとうございました。
EVP2(Easy Vision Picking2)*¹
(デンソーウェーブ社 製品)
「ピック&プレース」に特化したプログラムレスの画像処理アプリケーション
https://www.denso-wave.com/ja/robot/product/software/RCVision.html
AI模倣学習*²
(デンソーウェーブ社 製品)
高性能なデンソーロボットをAIでリアルタイム制御する汎用AI模倣学習ソフトウェア
https://www.denso-wave.com/ja/robot/product/software/aiil.html
モラベックのパラドックス*³
モラベックのパラドックス(Moravec’s paradox)とは、人工知能 (AI) やロボット工学の研究者らが発見したパラドックスで、「大人が行うような高度な知性に基づく推論よりも、1歳児が行うような本能に基づく運動スキルや知覚を身に付ける方がはるかに多くの計算資源を要する」というパラドックス(逆説)のこと
RC9*⁴
(デンソーウェーブ社 製品)
統合制御を実現するIPCベースのオープンロボットコントローラ
https://www.denso-wave.com/ja/robot/product/controller/rc9.html
ORiN2 SDK*⁵
(デンソーウェーブ社 製品)
ORiN2の仕様に基づいたアプリケーションプログラムやプロバイダを開発する為のミドルウェア
https://www.denso-wave.com/ja/robot/product/software/orin2.html
著作権・商標について
本誌に記載されている商品名、会社名、商標およびサービスマークは、各社の商標または登録商標であり、各権利者に帰属するものです。
本誌の掲載内容について、当社または第三者の知的財産権(著作権・意匠権・特許権・実用新案権・商標権・ノウハウ・アイデア等が含まれますがこれらに限定されません)に基づくいかなる権利も許諾するものではありません。また、掲載内容を著作権法上の無断利用の例外を除き、著作権者に無断で複製、送信、頒布、改変、翻訳等することは著作権法違反となります。
当社WEBサイトの利用規約は以下をご参照ください。
https://www.teldevice.co.jp/kiyaku.html
【DX対談シリーズ】今超えるべきビジョンロボットの壁と将来の展望
こちらの記事も読まれています



