- HOME
- 製品・サービス
- 人依存の工程を自動化
- 鋳物部品の仕分けロボット
製品・サービス
鋳物部品の仕分けロボット
代表業種:鋳造、製造
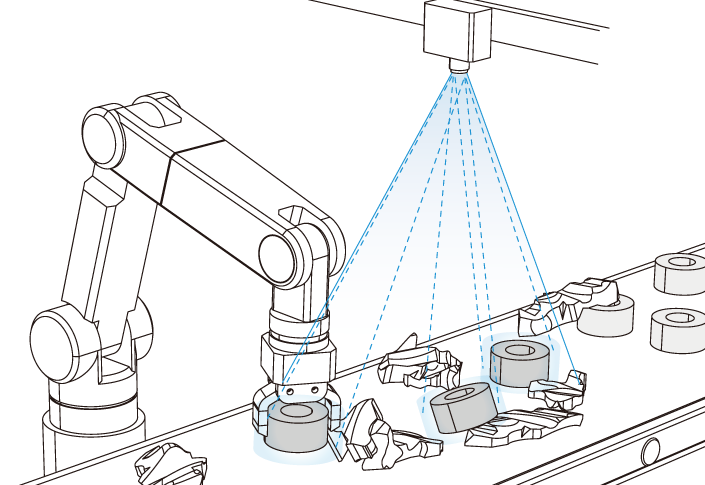
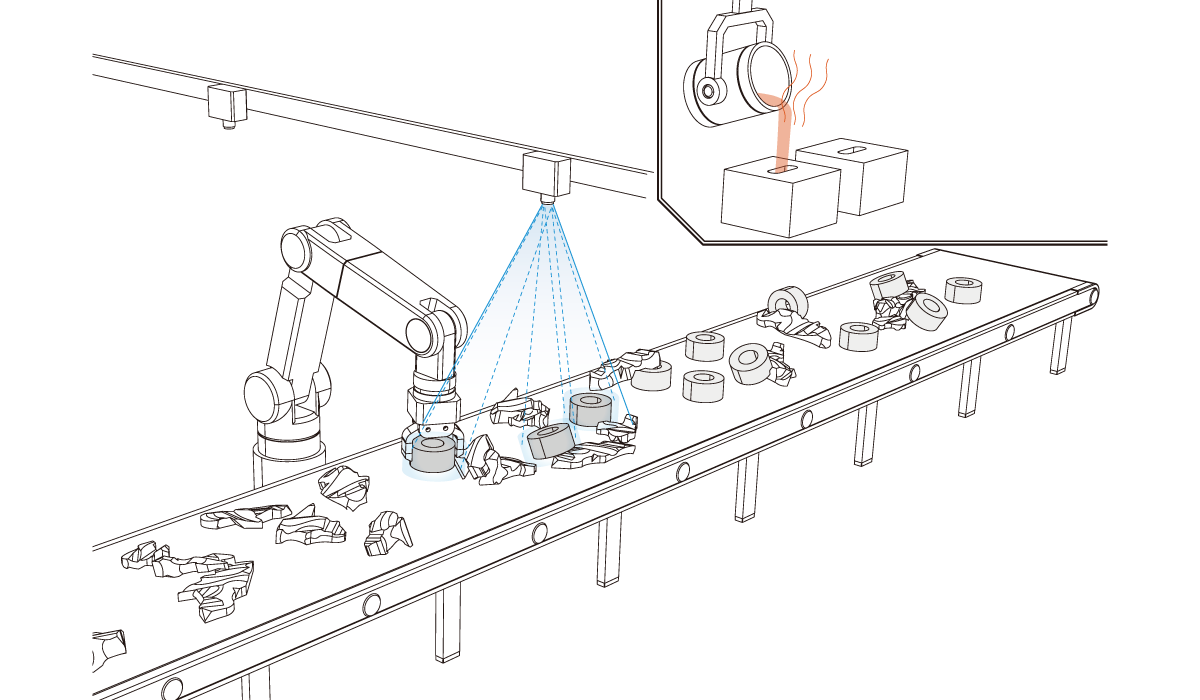
鋳物部品の製造環境は鉄などを溶解させるため高温になり、更に鋳物部品自体が重たいため、厳しい作業環境での重労働となっています。製造工程において混入する廃材などのため、対象となる鋳物部品との見極めなどが課題となり、自動化が難しい現場でした。本ロボットシステムはこの課題を解消し今まで自動化が難しかった鋳物部品のピッキング作業を自動化します。
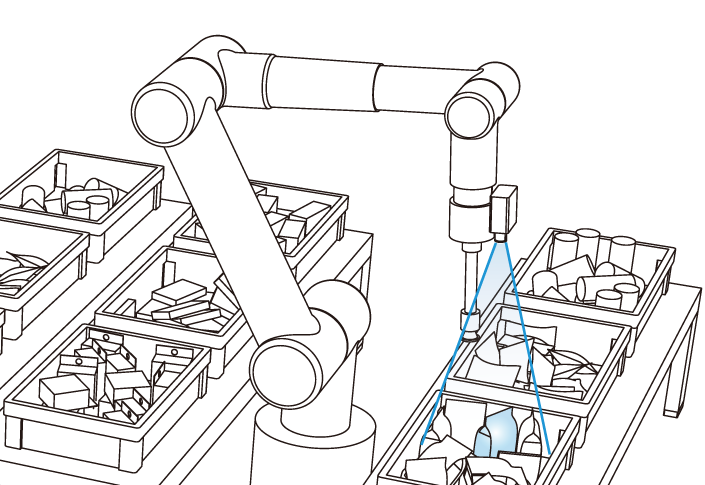
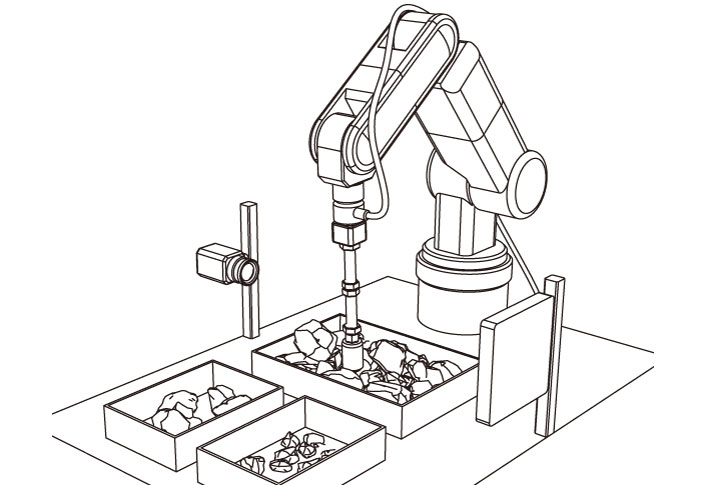
導入現場
ワークを事前登録することにより、鋳物部品の解枠工程後の鋳物部品と廃材の仕分けが可能です。また、鋳物部品を種類別で識別・仕分けすることも可能です。
動作ポイント
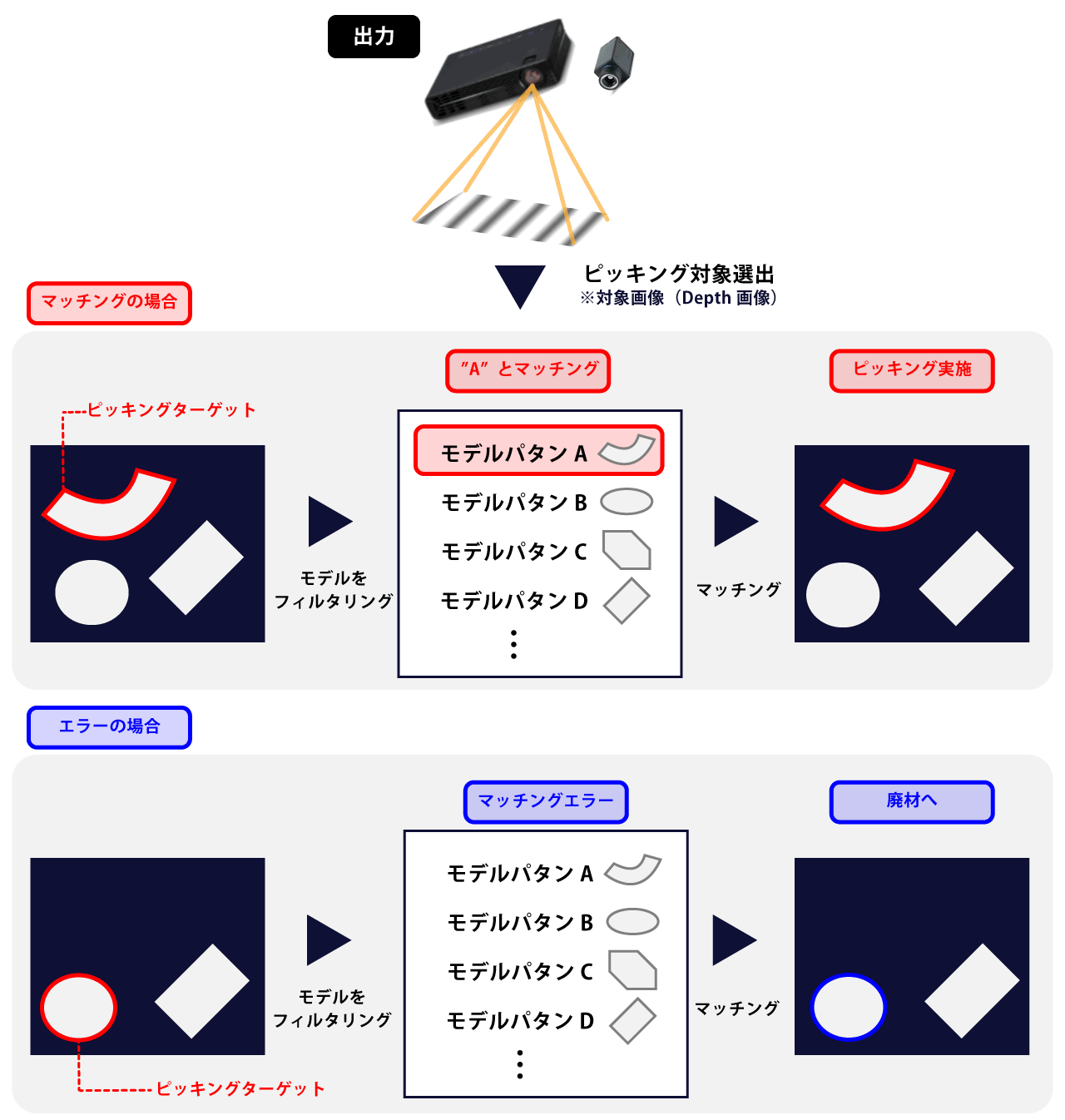
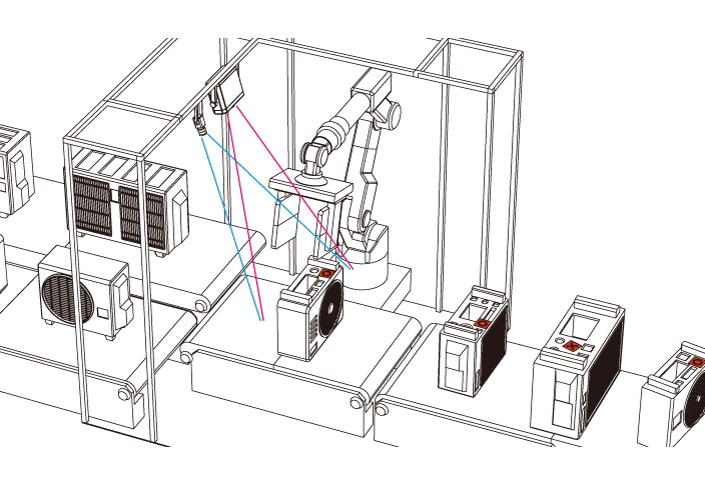
廃材と製品を見分ける
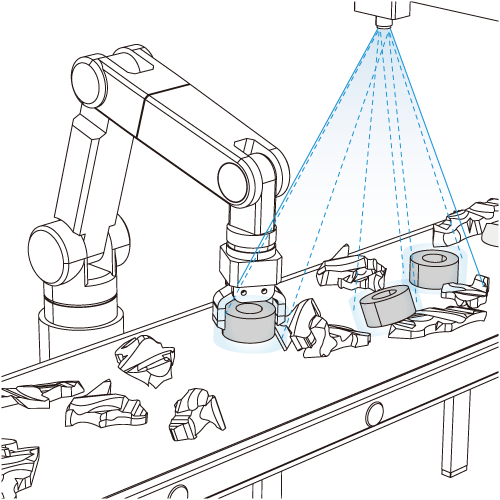
事前に登録してある製品以外は不特定な形状を持つ廃材と判断し、鋳物部品と廃材を仕分けすることが可能です。コンベア上の鋳物部品と廃材は重なりあっている状態でも重なっている部品を取り除く動作を組み込むことで、鋳物部品の取り逃しを軽減可能です。
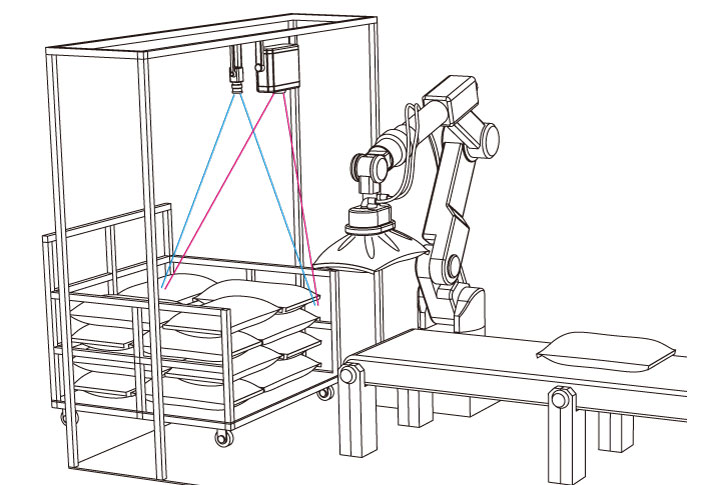
異形の部材を仕分け
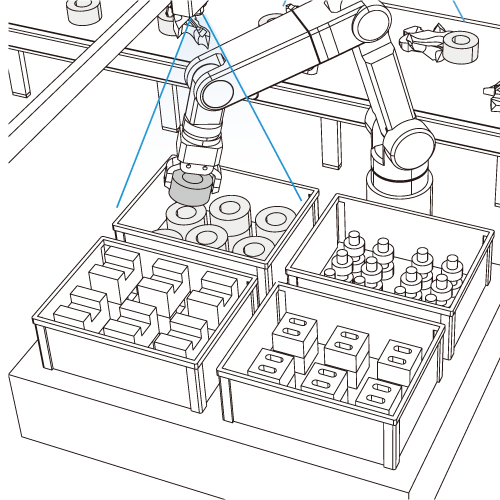
複数の製品を登録しておくことで、多品種少量生産の鋳物部品製造ラインにおいても、段取りの変更をする必要がなくピッキング作業を実現可能です。
作業工程
1. 製品登録
製品を事前に登録しておくことで、ピッキングミスを大幅に軽減するとともに、ピッキング後の仕分け作業が可能です。製品登録機能を使用することで、誰でも簡単に部品を登録することが可能です。
2. バラシ設定
製造現場では鋳物部品と廃材が重なりあって搬送されてくるケースがあります。仕分け作業前にバラシ機能を使った工程を追加、設定することで、ピッキング漏れを削減することが可能です。
3. 動作指定
・仕分け作業
複数部品を扱う場合、認識結果により仕分け先を設定可能です。
・マテハン機器とも連携し動作
コンベアなどマテハン装置に認識情報を出力することで、仕分け作業を連携させることが可能です。
解決事例
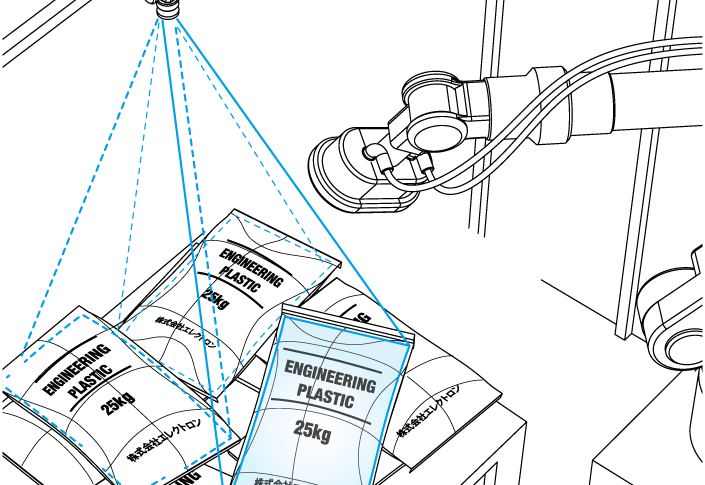
ルールベース
3Dスキャン+特徴点マッチング
独自のアルゴリズムで形状をマッチング処理
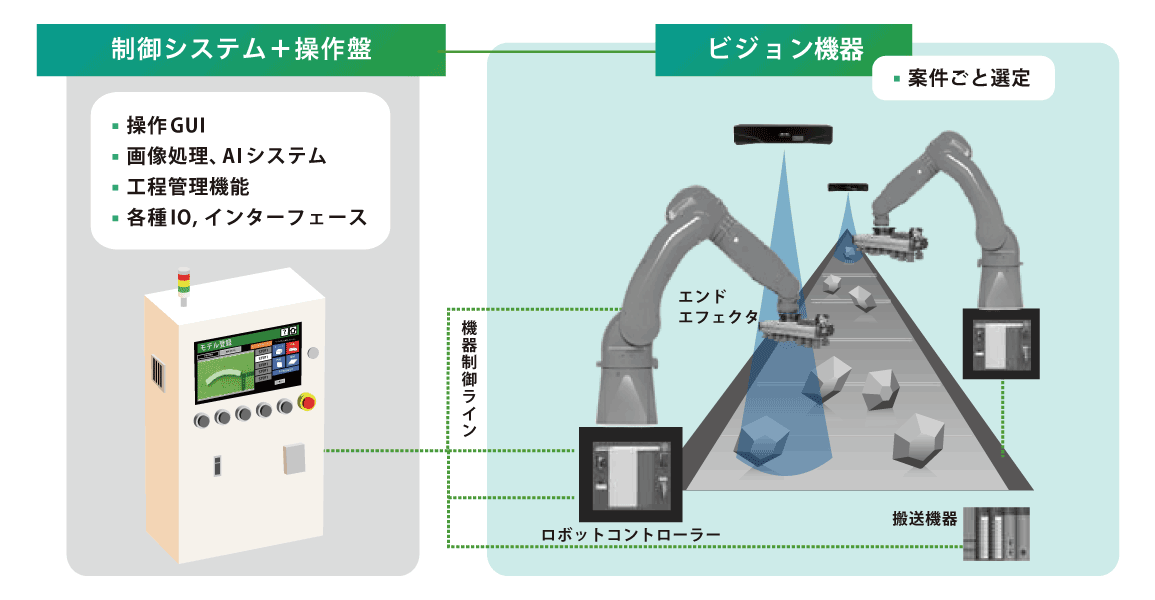
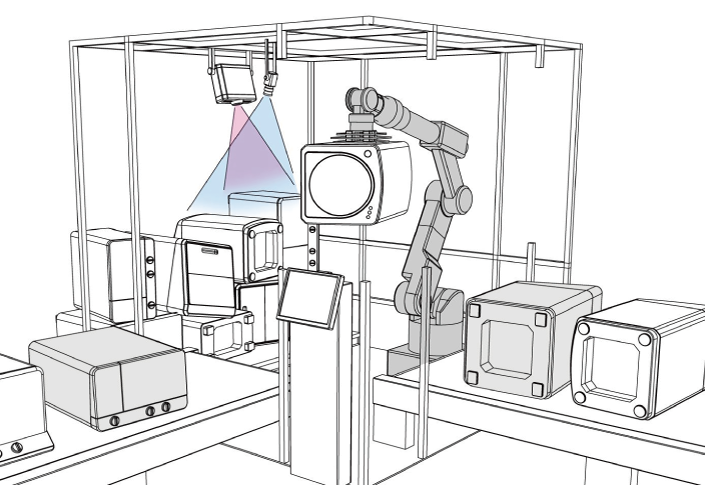
ロボットシステム構成
TriMathコントローラを採用したビジョンロボットシステムをご提案・ご提供いたします。
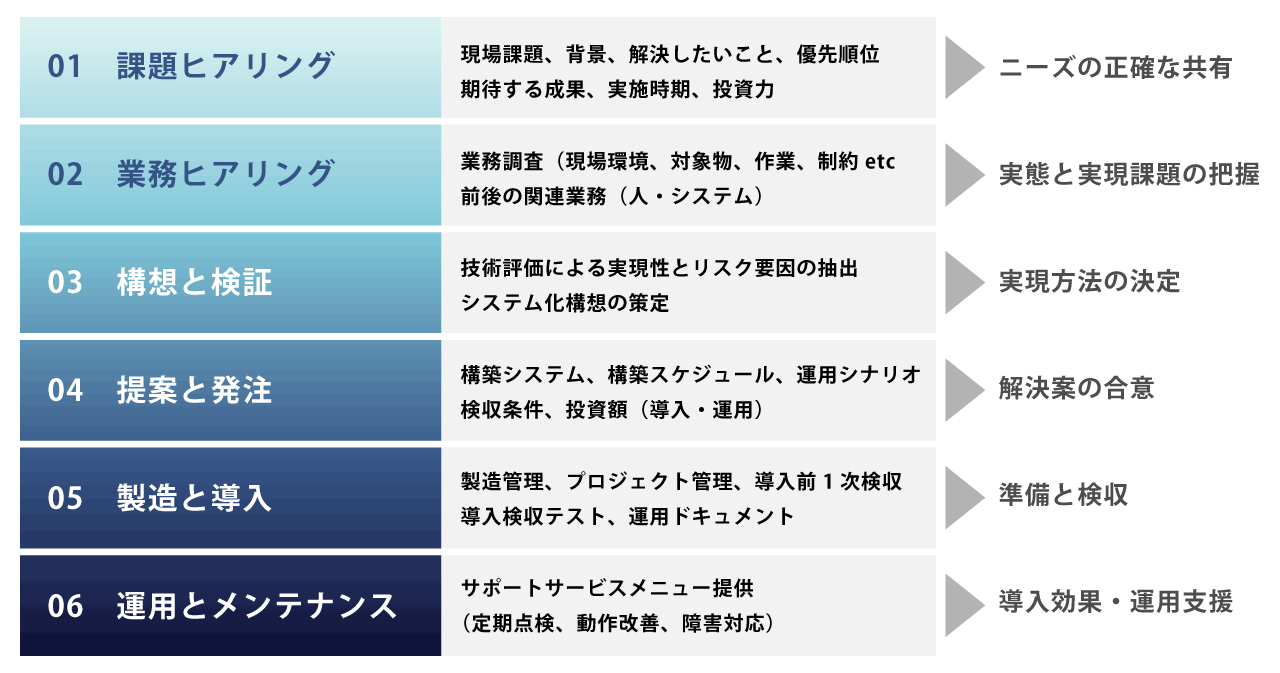
導入プロセス
関連製品・サービス

関連記事





関連記事
鋳物部品のピッキングロボット