- HOME
- 【DX対談】今超えるべきビジョンロボットの壁と将来の展望 ~第4話 モノづくり現場はリアルタイムの世界へ~
【DX対談】今超えるべきビジョンロボットの壁と将来の展望
~第4話 モノづくり現場はリアルタイムの世界へ~
ドイツに本社を置くオートメーション機器メーカー、ベッコフオートメーション株式会社にビジョンロボットシステムへの取り組みを伺いました。

ベッコフオートメーション株式会社
代表取締役社長 川野 俊充 氏
・1998年 東京大学理学部物理学科を卒業後、日本ヒューレットパッカード社に入社
・2003年 カリフォルニア大学バークレー校ハース経営大学院経営学修士(MBA)を取得
日本ナショナルインスツルメンツ社を経て、
・2011年 ベッコフオートメーションの日本法人の代表取締役社長に就任
インタビュアー
森川 健一(東京エレクトロン デバイス株式会社 設計開発センター第二開発部部長/PB事業推進室室長)
ビジョンロボットシステムについての取り組み
 ―――― ロボットシステムを支えるTwinCAT*¹、EtherCAT*²
―――― ロボットシステムを支えるTwinCAT*¹、EtherCAT*²
森川 初めに、ベッコフ社について教えていただけますか。
川野氏 当社はPC ベースの制御技術を使用したユニークな製品やソリューションを提供しています。本社はドイツのフェアルという人口25,000人ほどの街にあります。ドイツ国外では日本を含めて40ヶ国に拠点があり、75ヶ国で製品を供給しています。
お客様はセットメーカーで、成型機や工作機械、最近ではデジタル印刷機や3Dプリンターなどの製品があります。まだまだ成長中の企業ではあるのですが、2000年から平均で14~15%のペースで成長しています。
森川 今回のテーマであるビジョンロボット業界では、デンソーウェーブさんとも協業されていますね。
川野氏 はい。日本を代表するメーカーであるデンソーウェーブさんにTwinCATとEtherCATを採用していただけたことは大変光栄です。
2019年に当社の産業用PC(以下、IPC)をロボットコントローラーとして活用する「RC9」*³を国際ロボット展で発表させていただいたのですが、デンソーウェーブさんとの開発は今でもさまざまなシーンでシナジーを生んでいると感謝しています。
我々はロボットメーカーではないので、ロボットメーカーとのコラボがとても大事になるわけですが、ロボットメーカーのお客様でTwinCATとEtherCATの両方を採用いただいたのは、実はデンソーウェーブさんが世界で初めてなんです。
デンソーウェーブさんのコンセプトというのが、今までフォロワーだったロボットをリーダーとして使えるようにするというもので、それは大きな発想の転換だと思います。全ての頭脳やインテリジェンスを、ロボットコントローラーとして動いているIPCが司ることになるので、世の中で初めて「リーダーとして振舞うことができる産業ロボット」になるわけです。
森川 ロボットメーカーであるデンソーウェーブさんにとっても、このカタチが理想なのでしょうね。
川野氏 そうですね。必要に応じてリーダーにもなれるし、今まで同様にフォロワーとしても振舞えます。ただ、リーダーになった瞬間に、その他の設備連携、カメラ制御、画像処理、それらを開発できる環境、実行するためのランタイム環境などが必要になります。そういうものをロボットメーカーが全て開発して、準備、メンテナンスしていくには大変な工数がかかります。そこにオープンなプラットフォームであるTwinCAT、EtherCATの役割があるのだと思います。
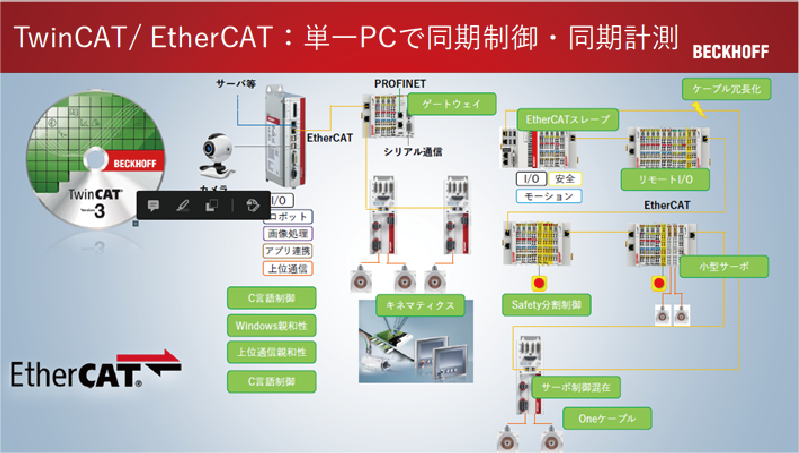
森川 リアルタイム同期制御の例として、ロボットアームの先に取り付けたXTS*⁴が高速に回転しながら、ペットボトルをピッキングしていくようなデモを見たことがあります。あれはかなりインパクトがありますよね。
川野氏 同期というのは突き詰めるとリアルタイム性なんですが、リアルタイム性というのは定刻かつ所定の時間内に制御の入出力処理が終わることを保証するもの。これを、異なるCPUがたくさんついていて通信系で分散しているようなシステムで実現しようとするのは技術的にはものすごく難しいことなのです。
我々制御機器メーカーからすると、同期する性能の保証までがメーカーの責任範囲だと思っています。その上で何を実現するかは、お客様のアイデア、要件、工夫次第になります。
森川 システムエンジニアも安心して設計を進められますよね。最後の最後に帳尻が合わないかもしれないと思いながらやるのと、最初から同期が保証されているのとでは大違いです。
ビジョンロボットシステムの課題
―――― 画像センサーとリアルタイム制御について
森川 ベッコフ社の製品にTwinCAT Visionというものがありますよね。実は、我々もビジョンロボットの構築の中でこれから使わせていただこうと考えているんです。
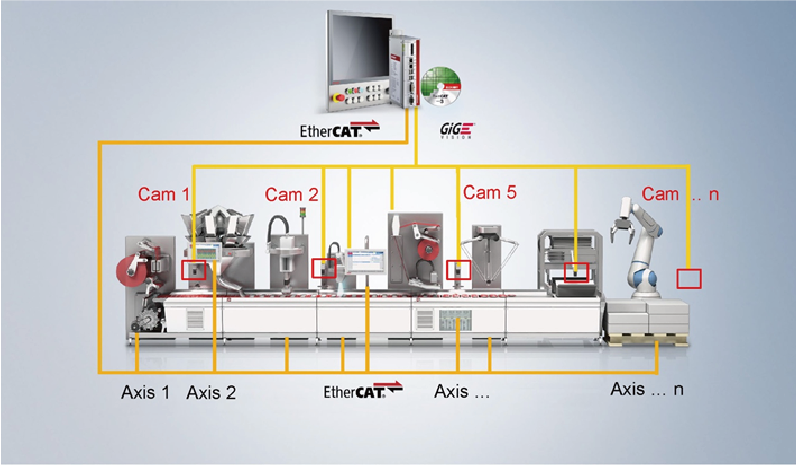
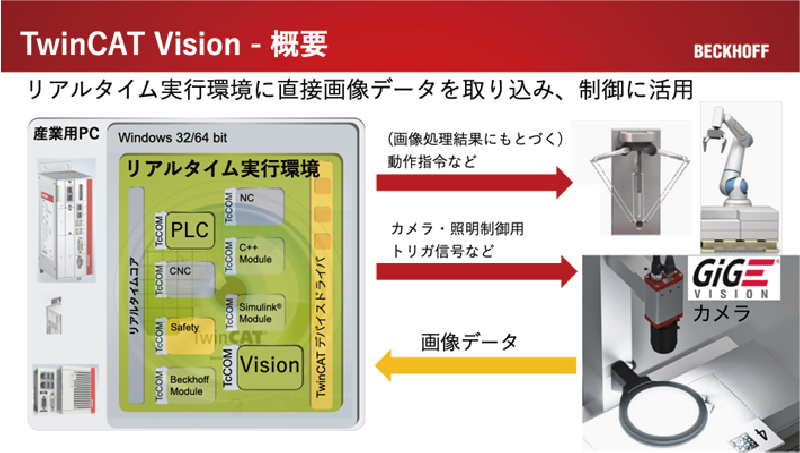
●TwinCAT Vision 統合システム構成

川野氏 ありがとうございます。TwinCAT Visionを使えば、GigE Vision規格のカメラからの入力に対して同じリアルタイム層で画像処理を実行できます。ロボットや周辺設備と同一の頭脳で画像も手足の神経系も見ているといったイメージです。
森川 インタフェースは、GigE Vision規格のみ対応ということですね。
川野氏 現状ではTwinCAT VisionはGigE Vision対応のリアルタイムカメラドライバとしての役割が大きいと思います。ただ、将来的にEtherCAT G*⁵対応のカメラが出揃ってくればTwinCAT Visionを使わなくてもカメラの同期が簡便にできるようなります。そうなるとリアルタイム画像処理環境としてのTwinCAT Visionがさらに重宝されることになるでしょう。
森川 そのEtherCAT Gは、ETG*⁶で規格化されているのですか?
川野氏 正式にはこれからです。ただすでにオープンにはなっていまして、さまざまな技術的課題や企業からのコメントが集まっていて、それらの同意形成が得られれば正式な仕様として公開できるというところまできています。
我々はリアルタイム原理主義者ですので、しっかり制御するためには最終的にリアルタイムで同期させないと駄目だという発想なんです。
どんなデバイスに対してもリアルタイムで制御できるようなカタチにして提供するというのが、制御機器メーカーとしての本質的なミッションであり、大事なところだと思うんですよね。
森川 ビジョンは圧倒的に情報量が多いので、リアルタイム層で処理するのは無理だという思い込みがありますが、それができるという話ですね。
川野氏 デンソーウェーブさんと一緒にやらせてもらったマルチモーダルAIロボットの取り組みを例に挙げますと、画像でも信号でも、デジタル化したデータというのはコントローラーまで届いてしまえば、コントローラーにとっては単なるデータなんですよね。
それを所定時間内に処理をして、必要な相手に返してあげればリアルタイム処理ができるので、それがデジタルIOの入出力なのか、何万画素とあるカメラ画像なのかでは難しさは違いますが、求められている要件は同じです。異なる課題を統合されたアーキテクチャで解くような製品やコンポーネント、ソフトウェアを提供していくというのが当社の制御機器メーカーとしての本質的な仕事だと考えています。
今後の展望
―――― リアルタイム処理の追求
森川 画像センサーの高解像度化やディープラーニングをはじめとするAI技術の適用などで情報処理の負荷は上がり続けますので、リアルタイム層でやるべき処理とそうでない処理とを切り分けていく必要があるように思います。
川野氏 鋭いご指摘ですね!(笑)例えば、カメラをロボットアームにつけて、そのカメラ映像を投影するヘッドマウントディスプレイを人が装着すると、自分がロボットになったかのような視点でロボットを操作できるんです。でもやっぱり映像が遅れるので最初は酔うんですけど、だんだん慣れてくるんですよ。だいたいこの辺りでこれくらい遅れそうだから、ここら辺で操作を止めておけば、狙ったところまでアームが移動するだろう、という具合に分かってくるんですね。
元々私はそういうものも含めて遅延ゼロにするべきで、仮に遅延があったとしても少なくともすべて時刻同期させるべきだと考えていました。例えば、圧力や関節角度、画像のような情報の処理や伝送がそれぞれ遅れてもいいけど、それらを同期できるようにしておかないと模倣学習でロボットを姿勢制御するようなことはできないと思っていたんです。
森川 私もそう思います。同期していないと、センシングやフィードバックのタイミング関係に再現性がないと思いますので。
川野氏 それぞれの遅延が全て一定であればいいんですが、それが揺らぎ始めると恐らく不可能になると。ところが、先ほどの例では映像の遅延や揺らぎがあっても、だんだんロボットを上手く操作できるようになるんですね。
つまり、ノンリアルタイムでバラバラ入ってくる入力情報をうまく補正しながら処理をすることで、思い通りの姿勢制御をするための指令に変換するということが、人間にはどうやらできるらしいということです。ですので、全部リアルタイム処理できるのがアーキテクチャとしては理想ですが、できない場合でもやりよう次第なのかなと思います。人がそれをどのように実現しているかを紐解けばロボットで再現することもできるはず、という仮説ベースで取り組むのがサイエンス、とまで行かなくともエンジニアリングの醍醐味です。
森川 非常に興味深いですね。そもそも人間は、触覚のようなものは反射的に使っているかもしれないけど、視覚情報などに対する脳の処理は少し遅れますよね。もしかすると、人間工学的な視点から、リアルタイム層に入れる入れないという判断基準が得られる可能性もあるのではと思いました。
TEDへの期待
川野氏 我々は要素技術の一部を提供しているだけですし、ロボットメーカーもアームとしての製品を提供することが本業なので、そういうものを組み合わせて、あるいはカメラも組み合わせて、実際にこういうことができますよと見せてくれるシステムインテグレータが足りていません。
デンソーウェーブさんはロボットメーカーとして、その部分も提供できるようにしていくと伺っていますが、現状のシステムインテグレーターは請負の仕事をこなすことで精いっぱいで、本来提案をしたい領域まで手が回っていない感じがします。ユーザー側から見れば、ニーズとのギャップをまだ埋めてもらえていない状況なので、もしTEDさんがそこを埋められる存在となるなら、我々としても大いに期待したいと思います。
森川 ありがとうございます。期待されていることを明確に言っていただいた気がします。これまでに伺ったお話以外で、ロボット業界向けに検討されていることはありますか。
川野氏 ロボット向けのソリューション技術として私が期待しているものに「力制御」があります。ロボットを遠隔制御する場合や、不定形物などを指先の感覚を使って把持するようなアプリケーションでは、力覚や触覚といったセンサーを使って技術課題を解決することが多いと思いますが、ロボットのモーターのフィードバック信号を活用することで、実はセンサーレスにできる領域がまだまだ広がるのではないかと考えています。研究者のあいだでは、このロボットのセンサーレス化の研究が進んでいますので、引き続き注目していきたいと思います。
森川 大変興味深く有意義なお話ばかりでした。ありがとうございました。
*¹ TwinCAT:拡張性の高いリアルタイム制御ソフトウェア
https://www.beckhoff.com/ja-jp/products/automation/twincat/
*² EtherCAT:高速な産業用イーサネット規格
https://www.beckhoff.com/ja-jp/products/i-o/ethercat/
*³ RC9:デンソーウェーブとベッコフオートメーションが共同開発したファームウェアとして
提供可能な新コンセプトロボットコントローラー
https://www.denso-wave.com/ja/robot/product/controller/rc9.html
*⁴ XTS:ベッコフオートメーションが開発したEtherCATを用いたリニアモーター搬送システム
https://www.beckhoff.com/ja-jp/products/motion/xts-linear-product-transport/
*⁵ EtherCAT G:産業用Ethernet規格「EtherCAT」の新仕様、通信速度:1Gビット/秒
https://www.beckhoff.com/ja-jp/products/i-o/ethercat-g/
*⁶ ETG:OEM、エンドユーザーおよびテクノロジープロバイダーによってEtherCAT
技術の開発のサポートと普及を推進する国際組織
https://www.ethercat.org/jp.htm
著作権・商標について
本誌に記載されている商品名、会社名、商標およびサービスマークは、各社の商標または登録商標であり、各権利者に帰属するものです。
本誌の掲載内容について、当社または第三者の知的財産権(著作権・意匠権・特許権・実用新案権・商標権・ノウハウ・アイデア等が含まれますがこれらに限定されません)に基づくいかなる権利も許諾するものではありません。また、掲載内容を著作権法上の無断利用の例外を除き、著作権者に無断で複製、送信、頒布、改変、翻訳等することは著作権法違反となります。
当社WEBサイトの利用規約は以下をご参照ください。
https://www.teldevice.co.jp/kiyaku.html
【DX対談シリーズ】今超えるべきビジョンロボットの壁と将来の展望
こちらの記事も読まれています



