- HOME
- 製品・サービス
- 人依存の工程を自動化
- 工程作業連動コントローラー TriMath(トリマス)
製品・サービス
工程作業連動コントローラー TriMath(トリマス)

工程作業連動コントローラ―「TriMath」は、人依存の工程作業をロボット・設備等を連動させ自動化するためのコントローラーです。
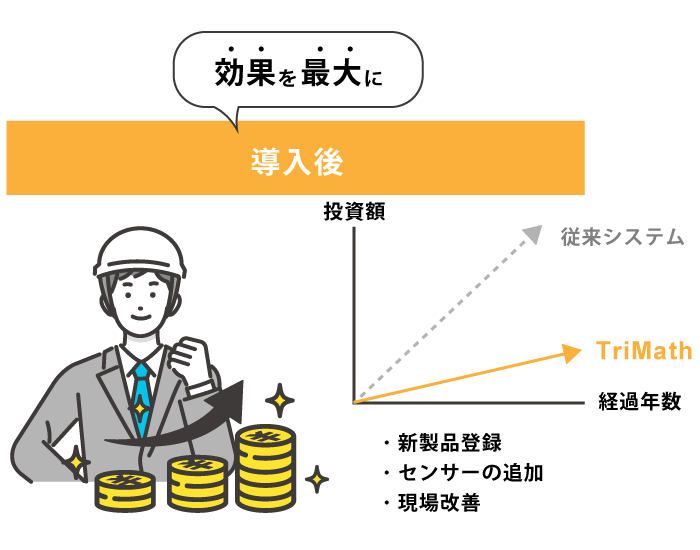
ロボット、搬送設備、ビジョンシステムなどの機器を制御するシステム構築・運用には、高度な専門知識をもった人材が必要でした。工程作業連動コントローラ―「TriMath」は、工程作業設定機能、ワーク設定機能を標準搭載することで、誰でも簡単にシステム構築・運用が可能になります。さらに、導入コストおよび運用コストも削減します。

お客様の現場課題
こんなお悩みはありませんか?
- 作業の自動化を検討したいが、工程で行う作業が複雑、変更もある
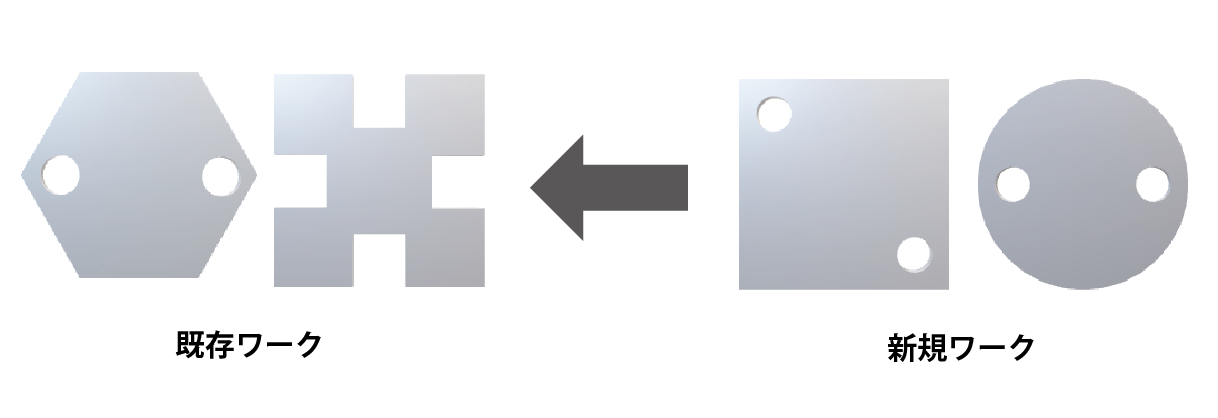
- 扱う対象物が多品種で、サイズ・形もいろいろ
- 導入、運用までを想定したシステム設計、構築作業は荷が重い
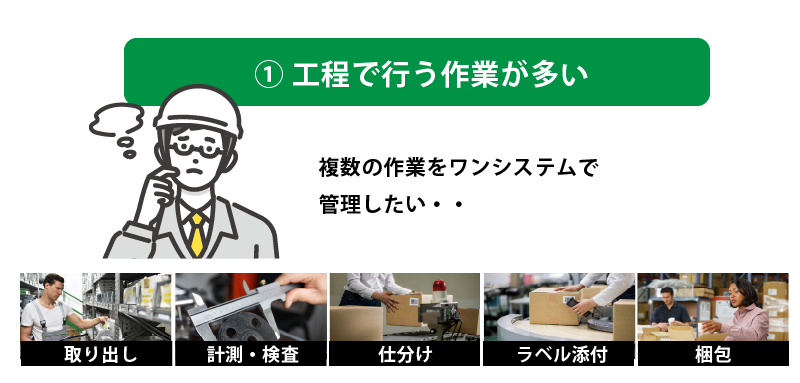
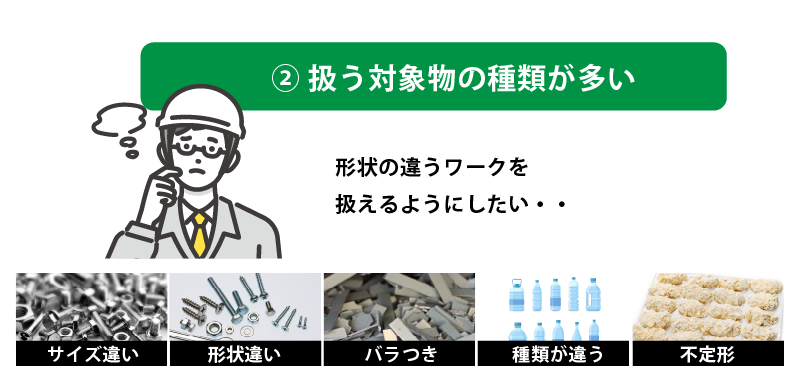
自動化が難しい人依存の現場の特徴には大きく2つあります。
1つは「工程で行う作業の種類が多い」ことです。例えば、取り出し、計測・検査、仕分け、ラベル貼り、梱包などの複数作業を一括で対応する必要がある現場です。もう1つは「取り扱う対象物の種類が多い」ことです。サイズが違う、形状が違う、種類が違う対象物を、日々の作業で扱わなければならない現場です。
こうした現場作業を自動化するには、多種多様な対象物(ワーク)の認識ができる仕組みと、その対象物に対して複数の作業をワンシステムで実現する工程制御・管理の仕組みが必要となります。
人依存の現場課題の特徴
3つの特長
工程管理プラットフォーム「TriMath」は、人依存の工程作業を自動化するための3つの特長を持っています。
工程作業連動コントローラ―の特長
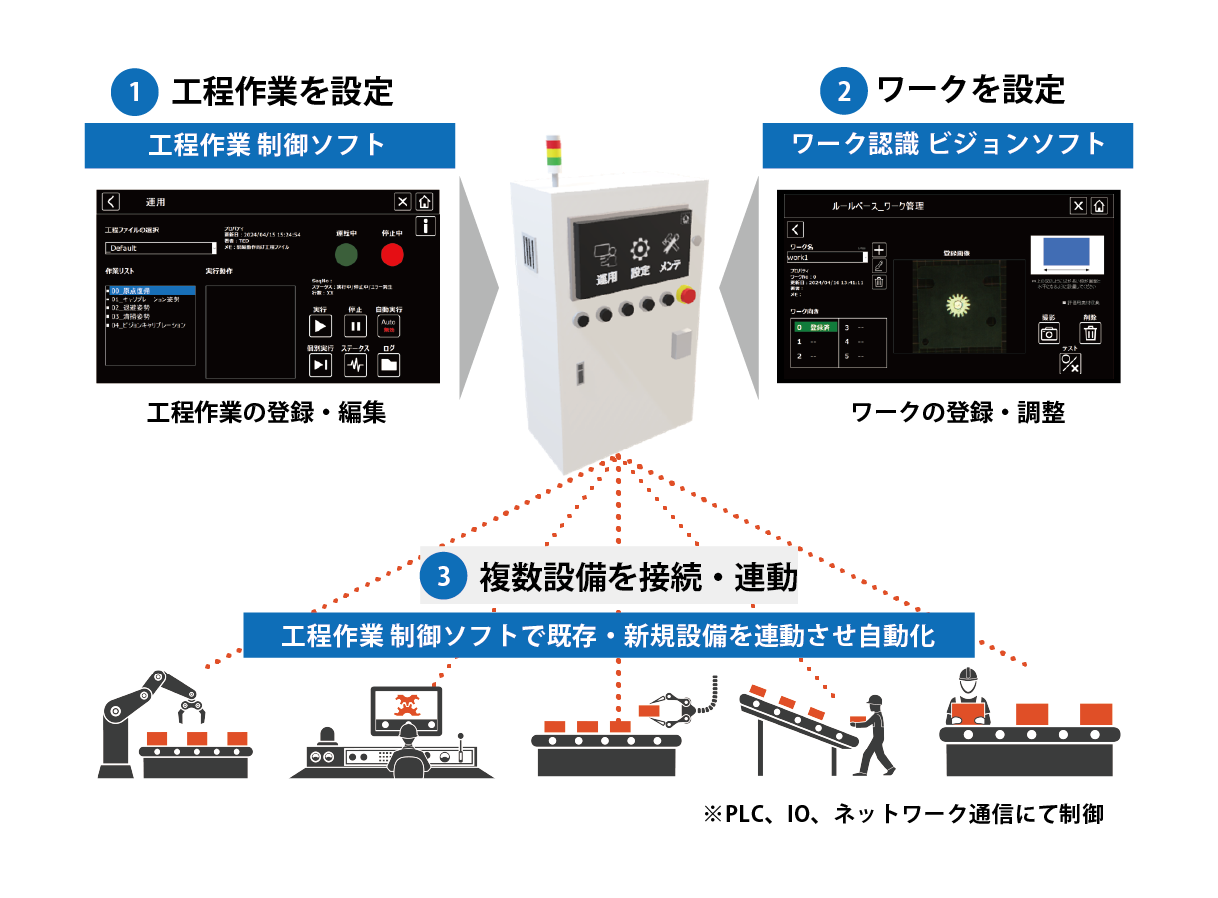
1. 工程作業を設定
複数作業を指示・切替できる工程作業設定機能
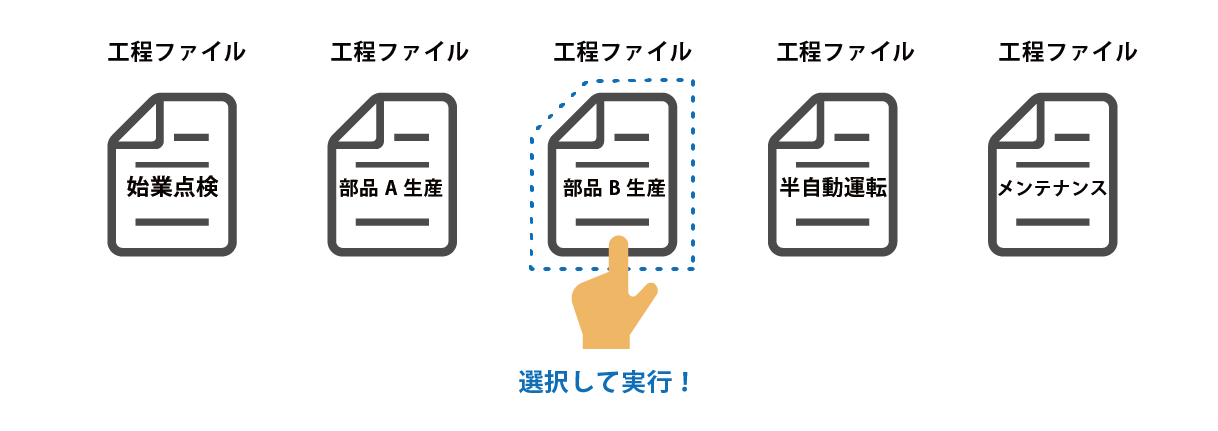
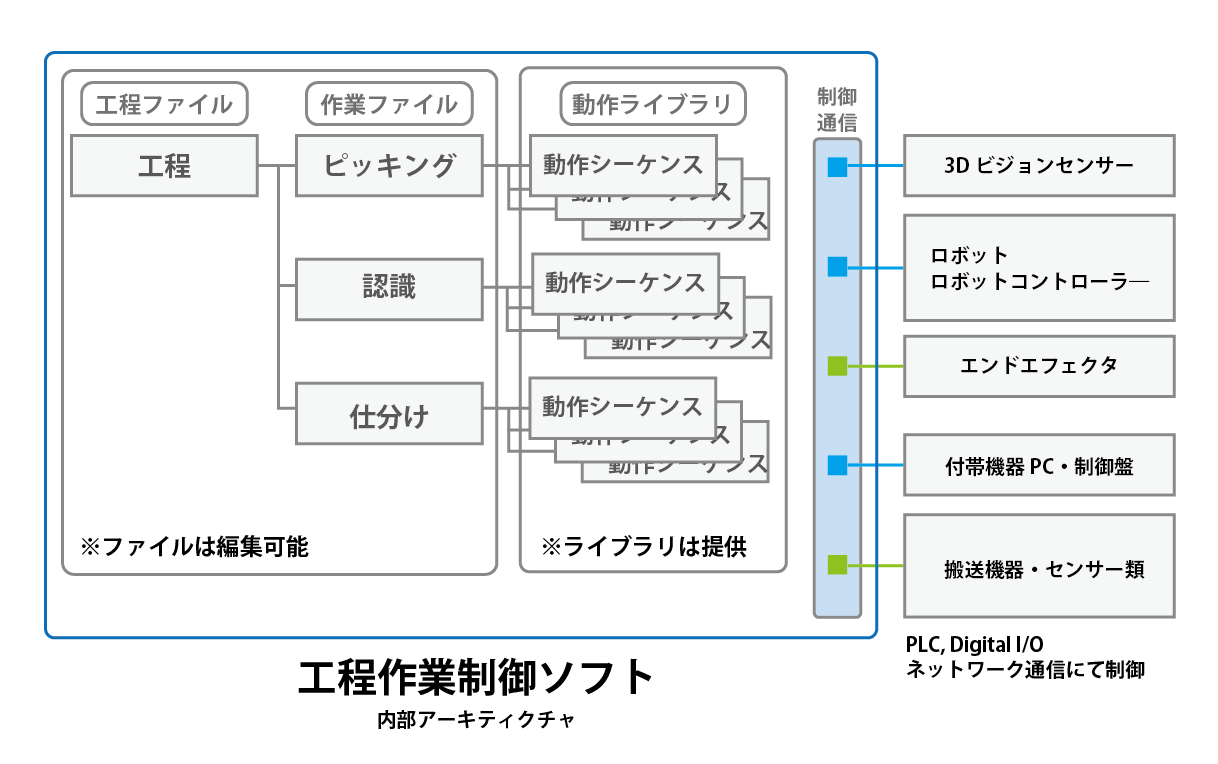
工程作業連動コントローラ―「TriMath」は、工程作業内容が記述されている「工程ファイル」によって作業を指示することができます。操作方法はいたってシンプルで、目的の「工程ファイル」を選択して実行ボタンを押すだけで、慣れ親しんだパソコンのソフトウェアを操作する感覚で、工程作業を実行することができ、誰でも簡単にあつかうことができます。
2. ワークを設定
AI・画像処理を連携させ、多品種の形状・サイズを認識・識別できるワーク設定機能
多品種少量生産の現場では、ワーク品種が非常に多く、さらに新しいワークも随時追加されていきます。工程作業 連動コントローラ―「TriMath」は、そのような現場に対応するため、ワーク設定機能を標準で装備しています。ワーク設定機能は、ワークの特長や作業内容により「ルールベース」もしくは「AI」登録を選択することができ、ソフトウェアのメニュー画面に従いながら簡単にワークを設定することができます。設定したワークを「工程ファイル」内に組み込むことで新しいワークの工程作業も実現可能です。
3. 複数設備を接続・連動
工程ファイルにて既存および新規の設備(ロボット、ビジョンシステム・搬送設備など)を接続・連動
3つの機能で変化し続ける製造現場に追従!
ユースケース
工程管理プラットフォーム「TriMath」を活用した具体的なユースケースをご紹介します。
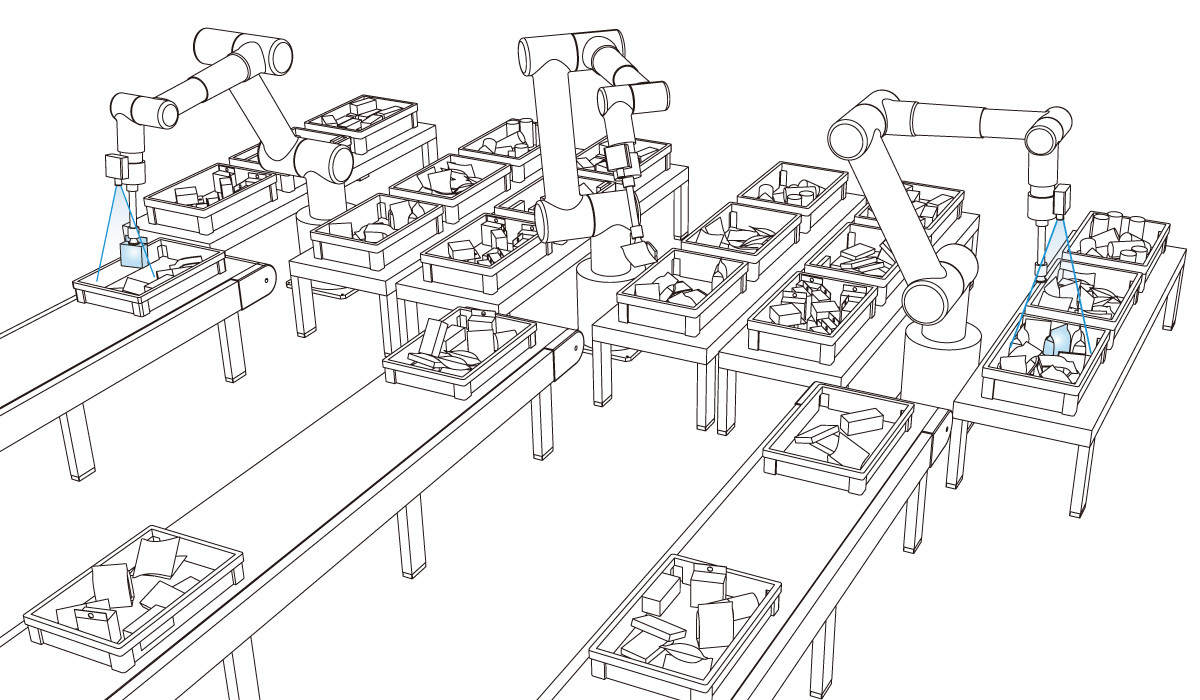
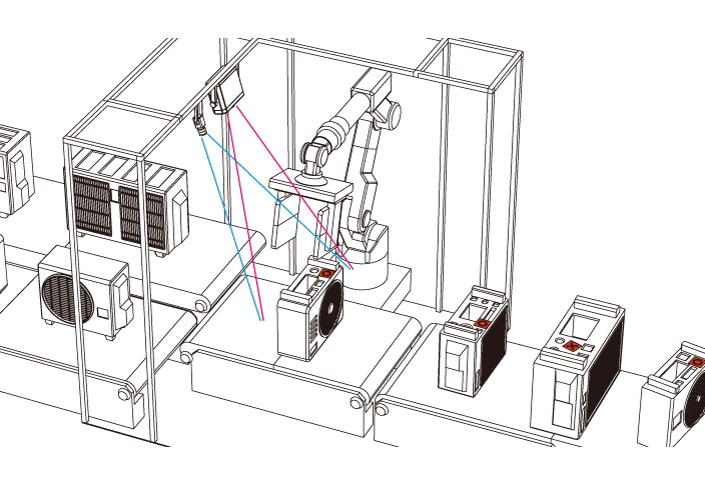
生産工程の加工補助・検査・仕分け作業の自動化
工場の部品加工工程では、工作機械へのロード・アンロードおよびその後の検査、不良品の除去、仕分けなどの工程があります。特に多品種を扱う工程をまるっと自動化するには、新規・既存の設備を連携させ、扱う商品に合わせて動作を適切に管理していくことが求められます。こうした現場の自動化にも「TriMath」は活用いただけます。
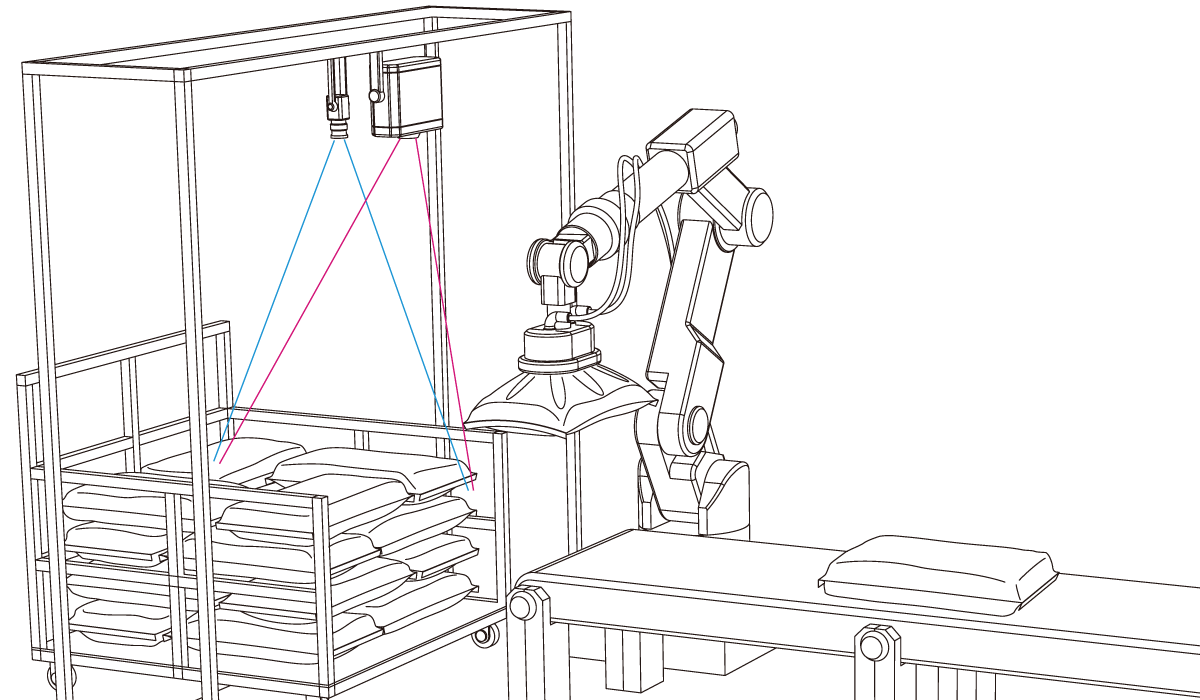
部品出荷工程作業

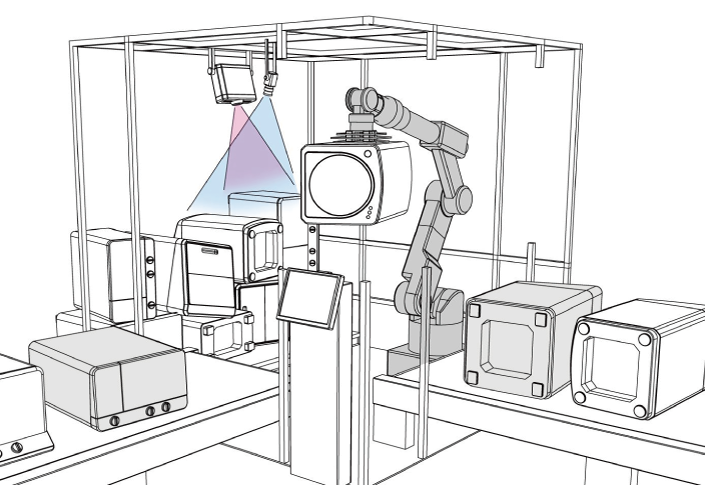
提供システム
「TriMath」は現場に合わせて選定したビジョンシステム・ロボット・付帯機器を接続・連携可能な制御盤をご提供します。ビジョンシステム・ロボット・付帯機器をシームレスに連携させることで、ロボットビジョンシステム導入プロセスを大幅に簡素化します。専門知識のない方でも、ビジョン機器の選定やPLCプログラム、制御盤の設計・製作の手間を省くことができます。

| 項目 | |
|---|---|
| 内容 | |
| 対応可能な作業 |
|
| 制御システム機能 |
|
| インターフェース(通信プロトコル) |
|
| 対応ロボット |
|
| 対応ビジョン |
|
| コンピューティング環境 |
|
選べる導入方法
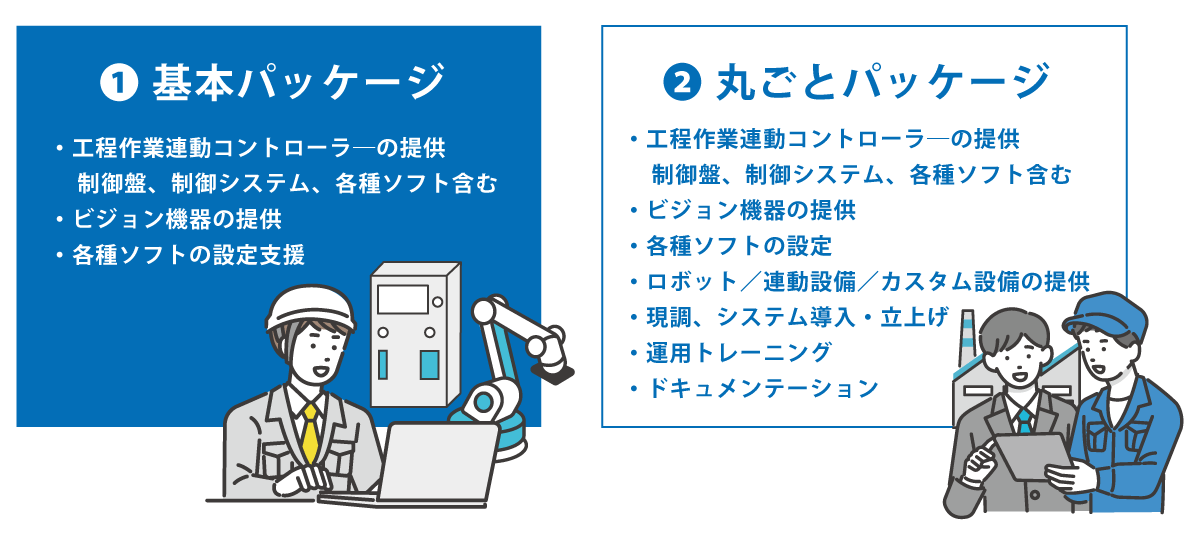
導入・運用プロセス
1. ヒアリング(実態と実現課題の把握)
- 現状(作業内容、ワーク形状・積み方、環境など)
- ご要望(背景、内容、スケジュール、費用感など)
2. 構想と整合(実現方法の整合)
- 実現性とリスク要因の抽出・システム化構想の策定
- 構想のご説明およびすり合わせ
3. 提案と発注(解決案の合意)
- 構築システム、構築スケジュール、運用シナリオ
- 検収条件、投資額(導入・運用)
4. 製造と導入(準備と検収)
- 製造管理、 プロジェクト管理、 導入前1次検収
- 導入検収テスト、運用ドキュメント
5. 運用とメンテ(導入効果・運用支援)
-
- サポートサービスメニュー提供(動作改善、障害対応)
導入事例
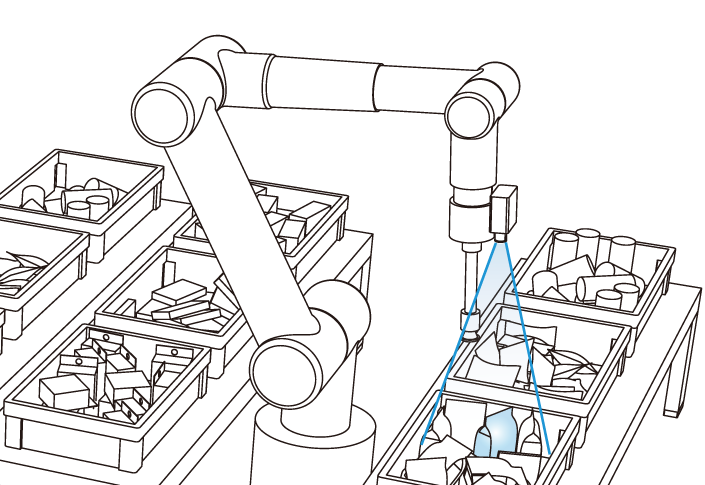
洗濯機
ピッキング・デパレタイズ
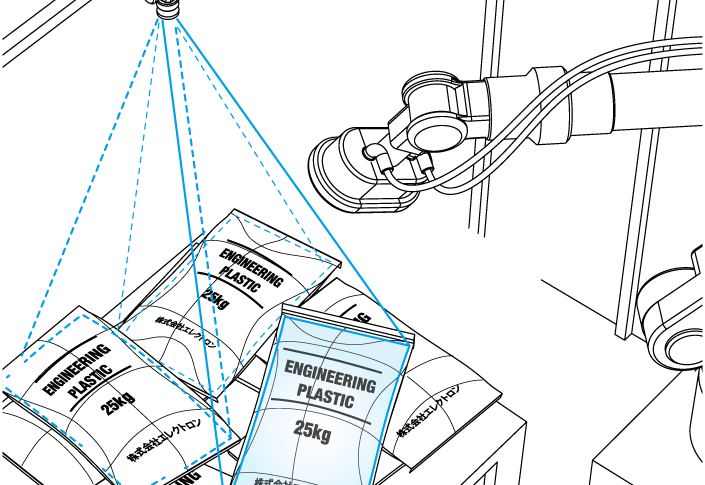
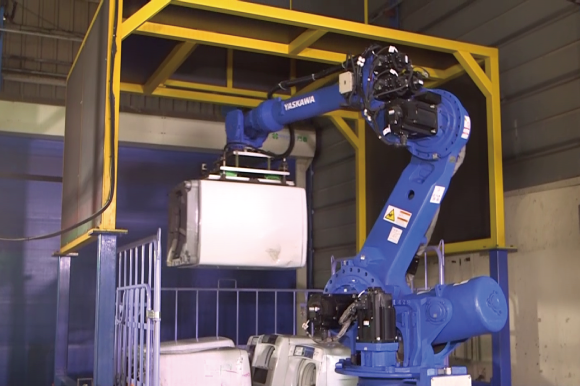
廃棄室外機
ピッキング・仕分け
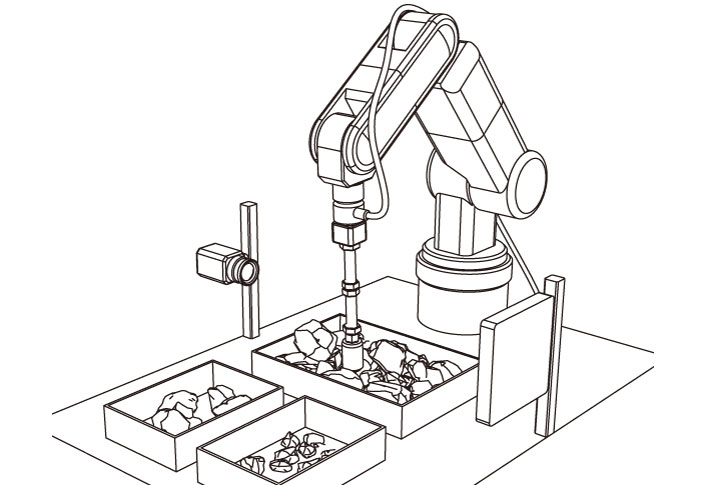
不定形物の
ピッキング
用語解説
ロボットビジョンとは
位置検出や検査のためにFAロボットや協働ロボットに取り付けるカメラシステムで、「マシンビジョン」とも呼ばれます。カメラシステムをつけることでロボットに目を持たせ、物の形や特徴をロボットに伝達する役割があります。状況を捉える「センサ(カメラ)」、撮像した対象物を認識して判断する「画像処理システム」などで構成され、画像処理の結果に合わせてロボットに指示を出す役割も果たします。こうした技術は、自動車、電機、電子デバイス、工作機械、食品、物流、溶接、加工のような業界でも多くの実績があります。
産業用FAロボットとは
産業用ロボットとは、3軸以上の自由度があり、プログラムによって自動制御可能なマニピュレーションロボットを言います。工場の自動化システム(ファクトリーオートメーション)では、主に「垂直多関節ロボット」、「水平多関節ロボット(スカラロボット)」、「パラレルリンクロボット」、「直交ロボット」の4種類があります。
協働ロボットとは
協働ロボットとは、人と協力しながら働く人間協調型の産業用ロボットです。産業用ロボットは、安全柵が必要で隔離された環境下での利用にとどまっていました。この安全柵なく同じ空間で人と一緒に柔軟な作業できるのが特徴です。そのため協働ロボットでは、ロボットビジョンシステムを活用活用することで、作業の効率化や多品種・他工程への対応、コスト削減などに大きな効果を発揮します。
ロボットアーム(マニピュレータ)とは
ロボットアームは、垂直多関節ロボット(6軸機構)、水平多関節ロボット(スカラロボット)、「パラレルリンクロボット」、「直交ロボット」それぞれで異なります。ロボットアームの自由度(可動範囲)、可搬重量(ペイロード)、駆動方式、速度、精度などの特徴から現場作業にあった機種を選定する必要があります。
ロボットハンド(エンドエフェクタ)とは
ロボットハンドはロボットアームの先端に取り付け、掴む・回すなどのハンドリング作業を担う重要なパーツです。大きく2つのタイプがあり、人間の手のような指・爪をエアシリンダーやモーターで駆動し対象物を掴む「把持ハンド」と、エアを利用し真空パッドで吸着させてワークを掴む「吸着ハンド」があります。選定には、作業対象ワークの「重量」、「形状」、「品質」、「柔軟性・材質」などを考慮することが有効です。
関連製品・サービス
関連記事






導入事例
リサイクル工場における重筋作業の低減を目指して

関連記事
工程作業連動コントローラー TriMath(トリマス)