- HOME
- 製品・サービス
- 人依存の工程を自動化
- 洗濯機ピッキング・デパレタイズ
製品・サービス
洗濯機ピッキング・デパレタイズ
■業界:リサイクル
生産工場ではロボットによる自動化が進む一方で、それ以外の領域ではなかなか導入が進んでいません。その一因は、扱う対象物が工業製品のように均一ではなくサイズや重さがバラバラで、ロボットを活用するには技術的な課題があるためです。本事例は、洗濯機のリサイクル現場の搬送作業をロボットにより自動化した事例をご紹介します。
課題
【業務課題】
・作業者の安全確保と重筋作業低減
・ラインの省力化・自動化
・慢性的な人材不足の改善
・不定形物のピッキング
・対象物の認識と仕分け
解決ポイント
マスターレススキャン技術
【課題】不定形物のピッキング
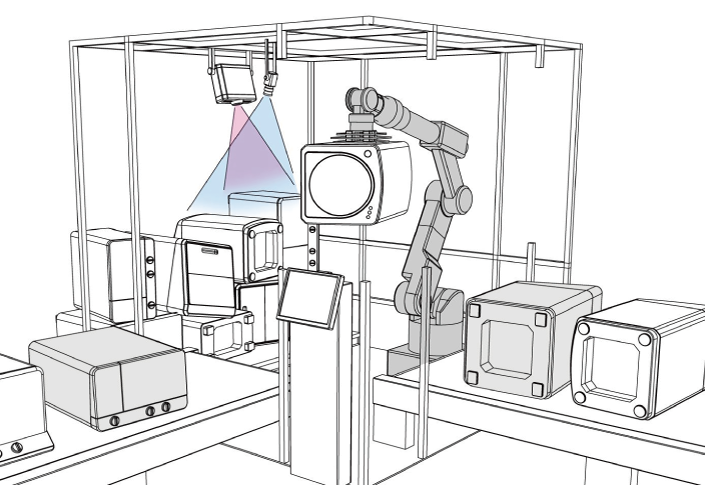
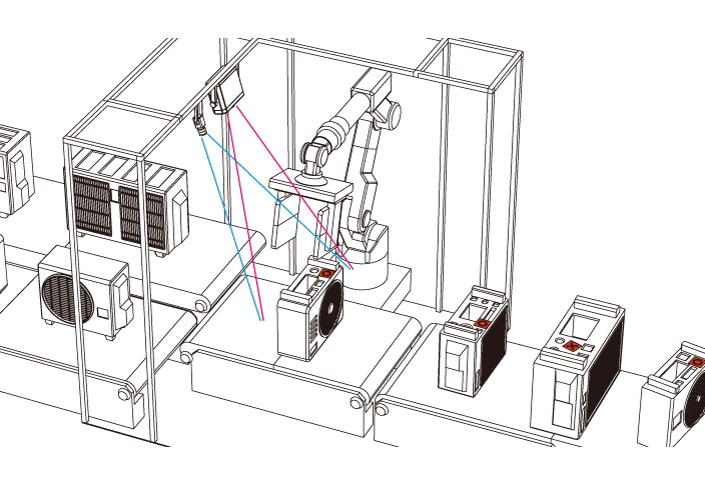
リサイクル工場に搬送されてくる洗濯機はメーカーや製造時期により形状やサイズがさまざまなうえ、コンテナに3段に積み上げられた状態で搬送されてくるため、従来のマシンビジョンシステムでは対応が難しく、人手により作業するしかありませんでした。ビジョンロボットシステムTriMath* は、プロジェクタにより特殊パターンを対象物に投影し、そのパターンを撮像することで3次元情報を取得します。独自のマスタースキャン技術により、洗濯機の荷姿状態を解析、ピッキングに必要な座標情報をロボットに出力しピッキングを実現します。対象物の事前の情報登録が一切不要なため、導入・運用コストの削減も可能となりました。
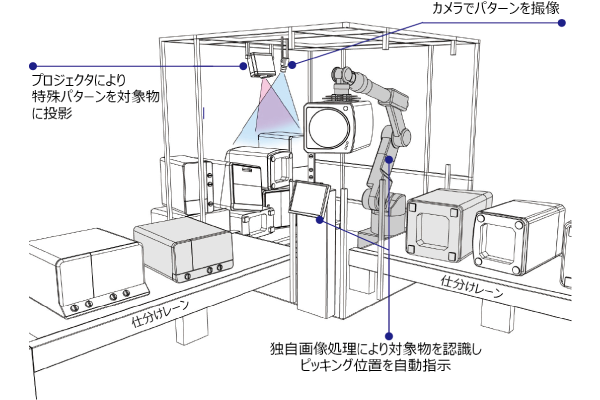 図1. 不定形物のピッキング(撮像と認識)
図1. 不定形物のピッキング(撮像と認識)
※TriMathは東京エレクトロンデバイスが開発した不定形物デパレタイズロボットシステムです。
AIによる認識・制御
【課題】対象物の認識と仕分け
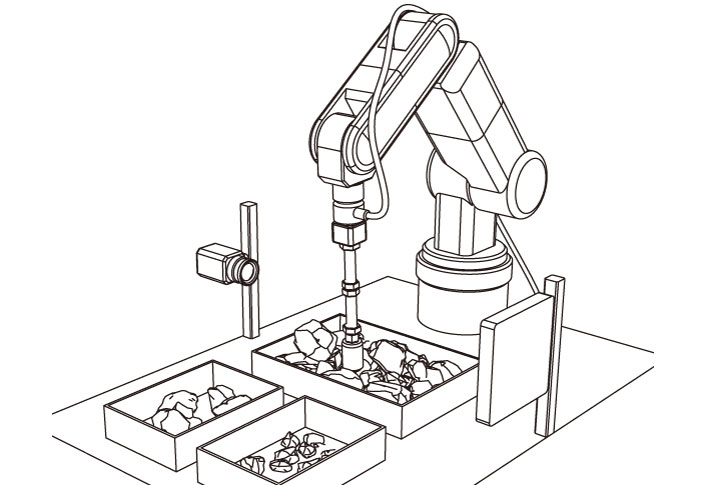
ピッキングした洗濯機は、種類で解体レーンに仕分けをする必要がありました。種類もドラム式、タテ型、二層式があり、メーカーによりその形状も異なるため、仕分けルールの明確化は難しく、人の目に頼る作業でした。
そこで、独自のAI技術を活用し洗濯機の画像約1万枚を学習し、ピッキングの可否を確認、ドラム式かドラム式以外かの判断、さらに洗濯機の天面方向を認識することで、洗濯機の種類による仕分けと洗濯機デパレタイズ時の天面方向の配置制御を可能にしました。これによりピッキング、デパレタイズ作業の完全自動化を実現させたことで、現場作業の負担を大幅に改善し、ライン全体の効率化検討といった新たなステップに進めることを可能にしました。
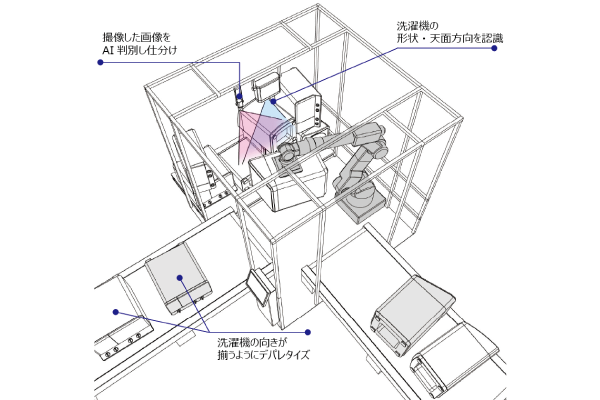 図2. デパレタイズ(認識と制御)
図2. デパレタイズ(認識と制御)
紹介動画
導入事例
リサイクル工場における重筋作業の低減を目指して
【JFEアーバンリサイクル株式会社様】
本事例の記事はこちら
関連製品・サービス

関連記事






関連記事
洗濯機ピッキング・デパレタイズ