製品・サービス
人手作業の自動化
メッキ部品のハンドリングロボット

諦めていた光沢部品の作業を自動化
自動化の第一歩は対象物を正しく認識する事です。メッキ部品などの光物は撮像自体が難しいため部品を認識することが困難でした。本ロボットシステムはメッキ部品のみならず、透明部品、黒色部品など、撮像が難しいと言われている対象物をAI認識技術を使用することで解決。取扱いできる部品の枠が格段と広がりました。
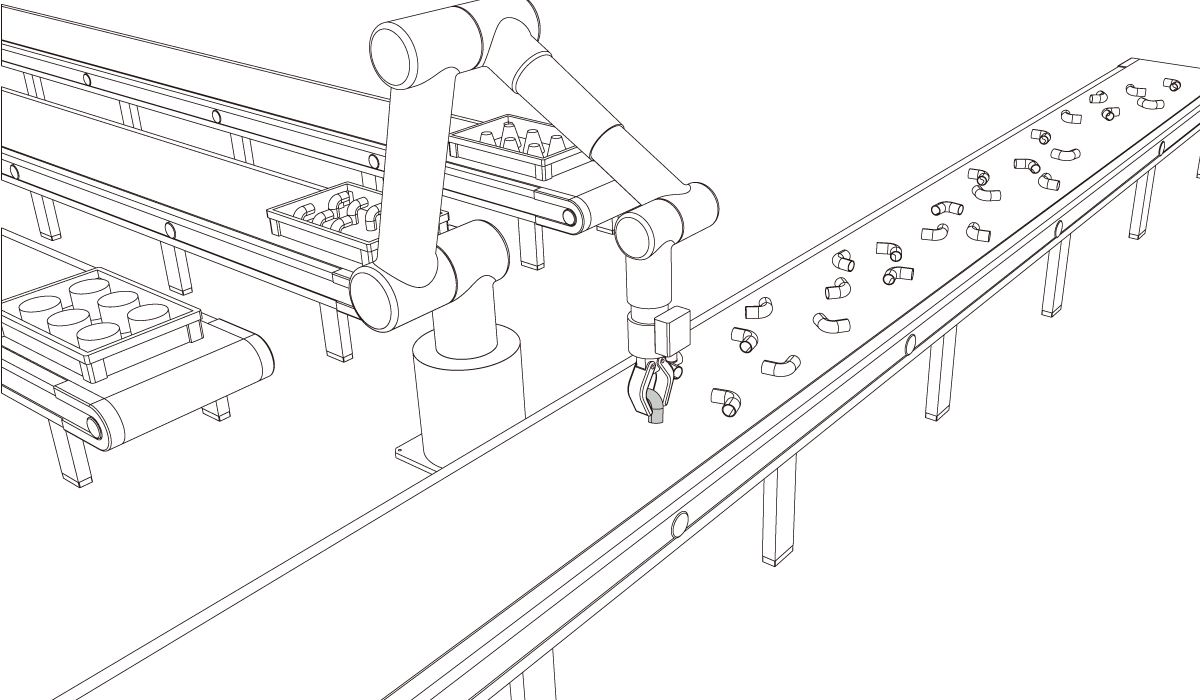
ロボットシステム導入現場
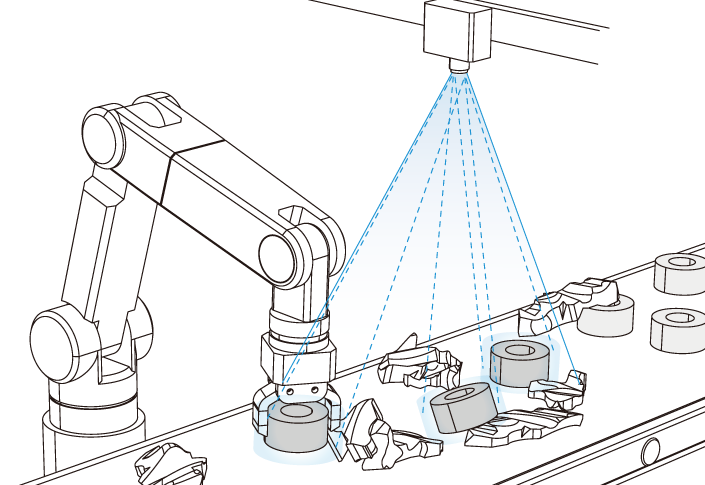
メッキ部品の出荷工程では、製造された部品が次々とコンベアで運ばれてきます。この部品をピッキングし、正しい姿勢で出荷箱に整頓して詰めていきます。
動作ポイント
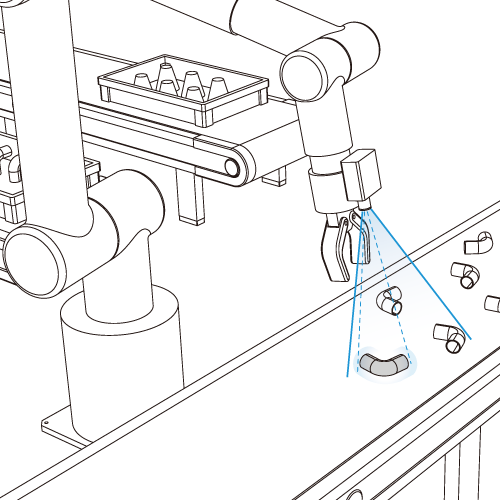
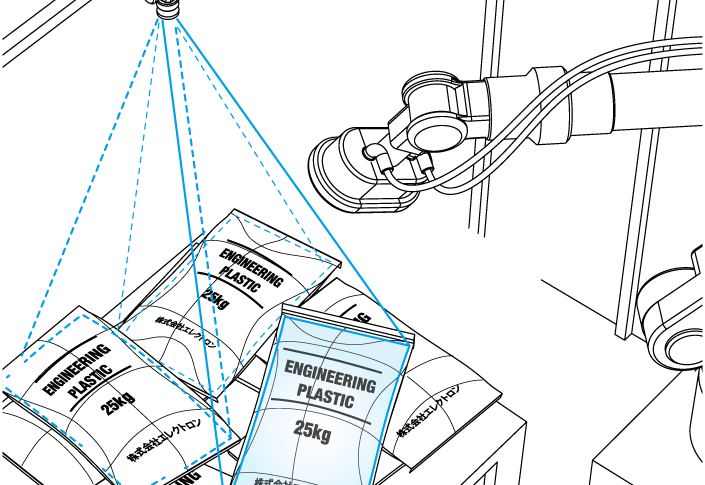
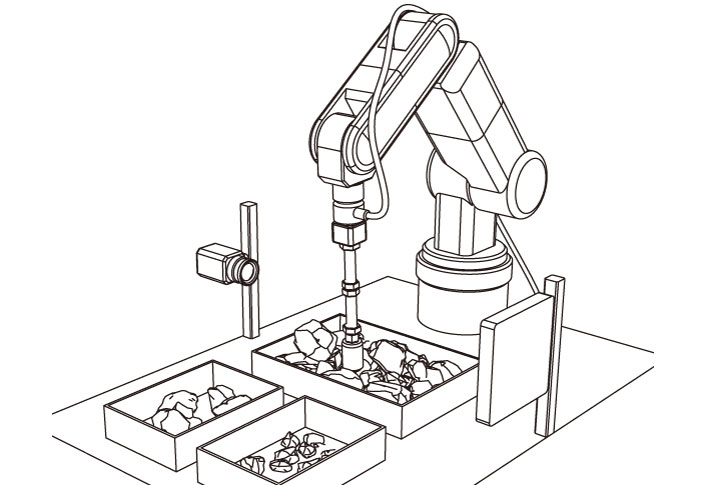
位置と姿勢を捉える
ロボットハンドに取り付けられたカメラにより、メッキ部品の位置と姿勢を正確に取られえ、ロボットハンドによる正確な把持位置を算出します。
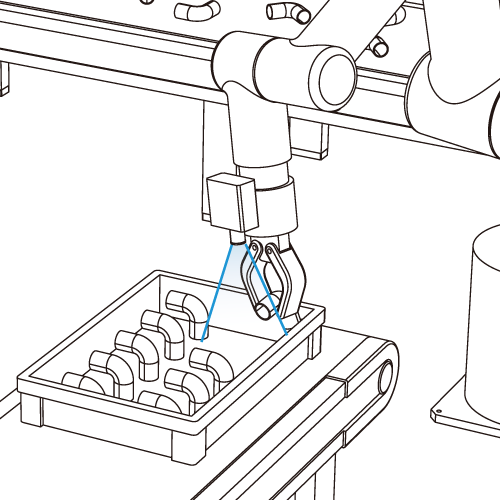
向きを揃えて陳列
メッキ部品は特定の姿勢、特定の位置にて把持されているため、部品の向きを揃えて出荷箱に格納することが可能です。
作業工程
1. メッキ部品登録
AI-TriMathビジョンが部品の姿勢を正確に認識しピッキングを行います。部品は事前に登録しておく必要がありますが、独自の登録シーケンスにより、人手をかけずにアノテーションが可能です。
2. マテハン同期設定
メッキ部品の認識には、撮影環境が影響します。コンベア上の部品を扱う場合には、デパレタイズ中はコンベアを停止するよう同期信号を出力可能です。
3. 動作指定
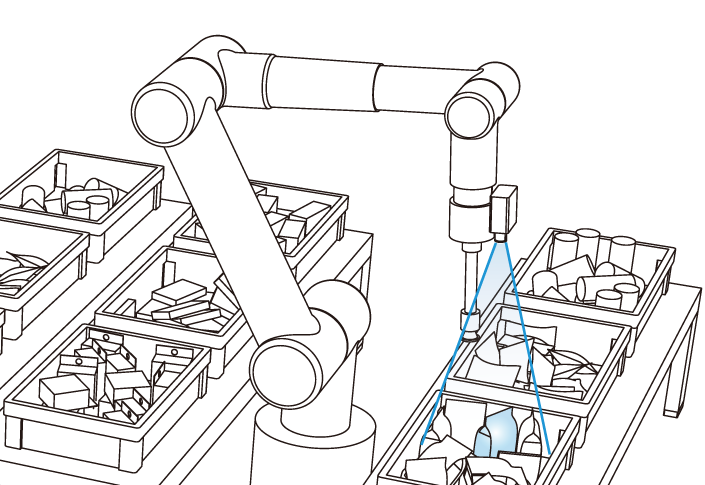
・ピッキング先の振り分け
複数部品を扱う場合、認識結果によりデパレタイズ先を設定可能です。
・部品の整頓
デパレタイズ先において部品の置き方を設定可能(整頓)です。
※メッキ部品:金メッキ、硬質クロムメッキ、光沢ニッケル、スズコバルト合金メッキ、クロムメッキ、半光沢ニッケル
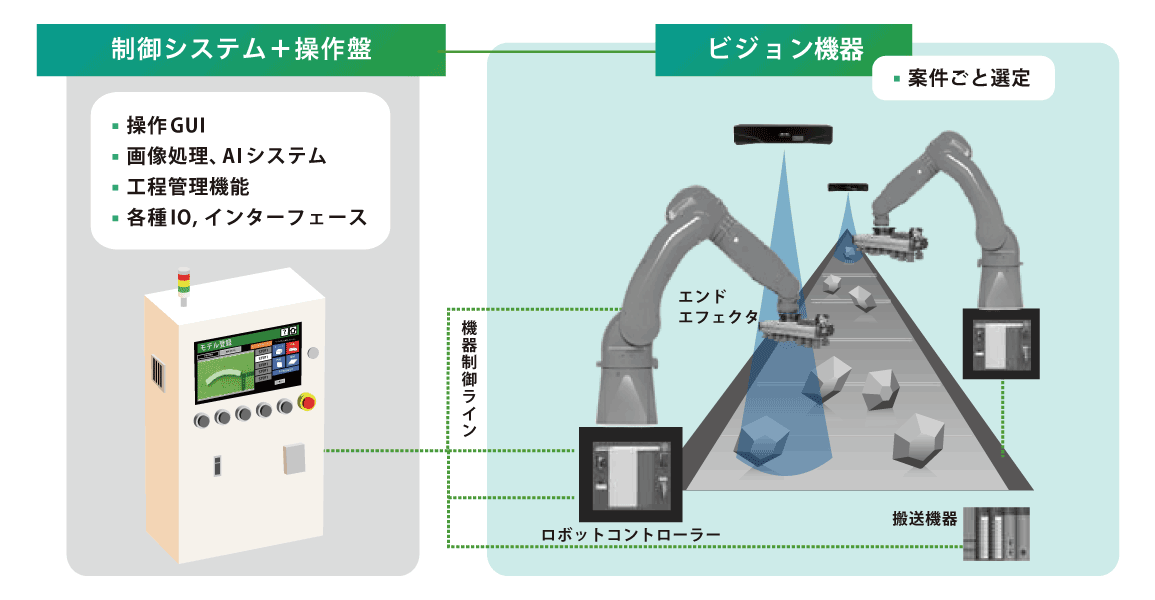
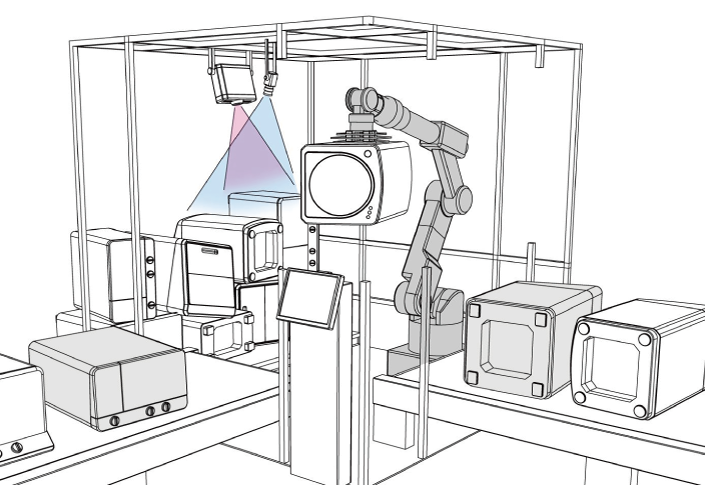
ロボットシステム構成
TriMathコントローラを採用したビジョンロボットシステムをご提案・ご提供いたします。
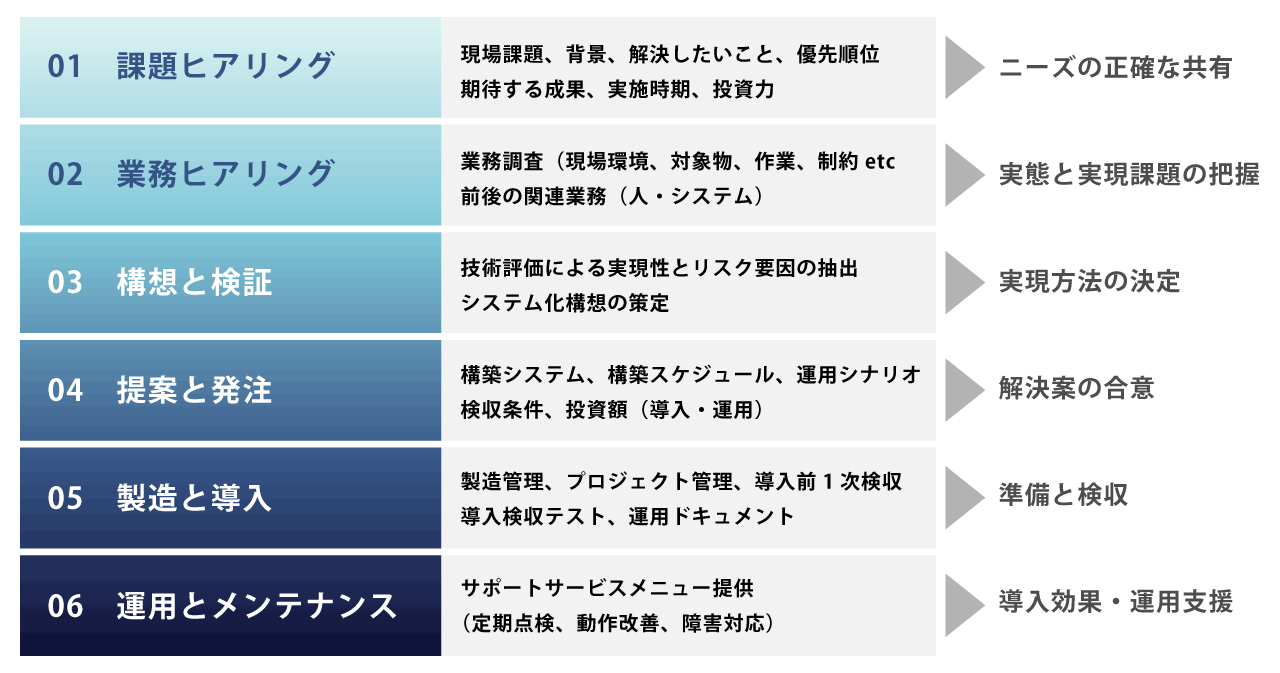
導入プロセス
関連製品・サービス
作業の自動化 工程管理プラットフォーム
材料袋のデパレタイズロボット
鋳物部品の仕分けロボット
商品のピースピッキング仕分けロボット
洗濯機ピッキング・デパレタイズ
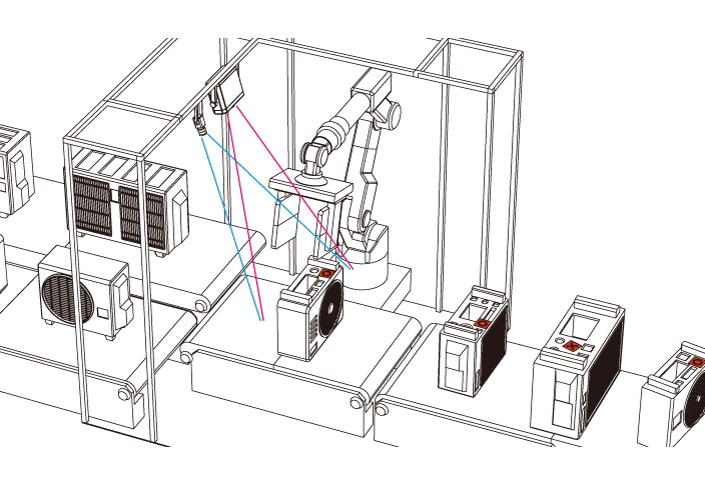
室外機 ピッキング・仕分け
鉱石 ピッキング・仕分け
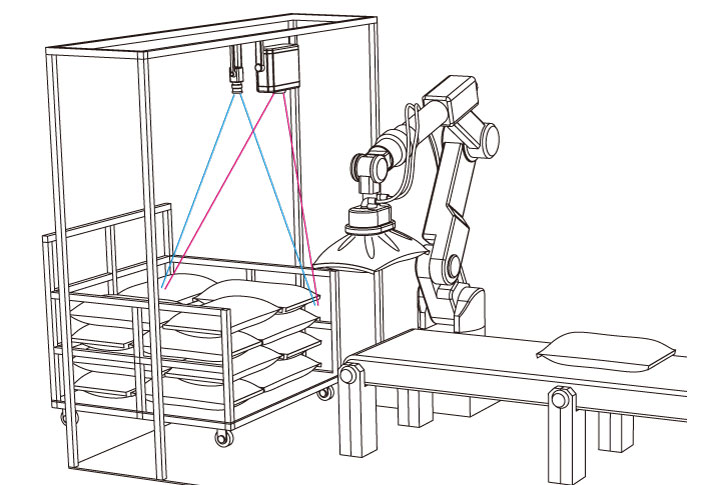
袋 ピッキング・デパレタイズ
関連記事
【DX対談】今超えるべきビジョンロボットの壁と将来の展望

【DX対談】今超えるべきビジョンロボットの壁と将来の展望~第5話 画像処理を超えた新たな闘い~

【DX対談】今超えるべきビジョンロボットの壁と将来の展望~第4話 モノづくり現場はリアルタイムの世界へ~

【DX対談】今超えるべきビジョンロボットの壁と将来の展望~第3話 光学機器の革新がビジョンの可能性を解放する~

【DX対談】今超えるべきビジョンロボットの壁と将来の展望~第2話 作業の重責を担うロボットハンドメーカーの今~

【DX対談】今超えるべきビジョンロボットの壁と将来の展望~第1話 多様化する市場ニーズに向き合うロボットメーカーの挑戦~
関連記事
メッキ部品のハンドリングロボット