- HOME
- 【画像処理マスターへの道】 ライブラリ新機能のご紹介 ~ピント合わせのお悩み解決~
装置メーカー 画像処理ソフト
【画像処理マスターへの道】
ライブラリ新機能のご紹介
~ピント合わせのお悩み解決~
画像処理に関連するさまざまな情報をお届けする連載です。
今回は、2025年11月末にリリースされたライブラリの新機能の中から、全焦点画像生成機能をご紹介します。
はじめに
カメラで画像を撮るには被写界深度の制約があります。高さの違いが大きい対象物に対して全体にピントの合った画像を撮るためには、離れた位置から撮るなどの工夫が必要です。しかし、装置の中での設計上、カメラ取付位置の自由度には限度があります。
また、近年ではイメージセンサのピクセルサイズの微細化も進み、主流は3.45um/pixelから2.5um/pixelなどに移り変わってきています。ピントの合う範囲は許容錯乱円の大きさ、つまりイメージセンサのピクセルサイズで決まりますので、被写界深度は浅くなってきています。
これらの課題に対して、ピントの位置を変えた複数枚の画像を撮像しておいて、全体にピントの合った画像を合成するという手法が知られています。
当社のライブラリでも今回のアップデートでこの機能を追加しましたので、いくつかのサンプルワークを撮像、処理した画像をご紹介します。
被写界深度と許容錯乱
レンズを通ってカメラのイメージセンサ(図の右端の縦線)に光が届くまでの経路を模式的に表したものが次の図です。
いずれの図も青色の実線がピントの合っているときの光の経路です。橙色の実線は、左図ではピント位置よりも被写体が遠くにあるときの光の経路を、右図ではピント位置よりも被写体が近くにあるときの光の経路を表したものです。
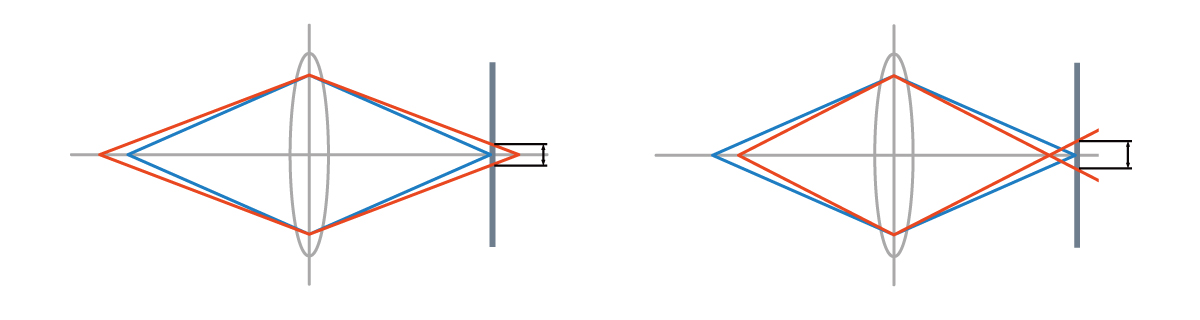
橙色線とイメージセンサとの交点の幅が錯乱円の直径です。錯乱円がイメージセンサのピクセルサイズよりも大きくなると、本来1点に見えるものが複数画素に跨って観測されるようになります。これが「ボケている」と言われる状態です。
逆に、ピクセルサイズよりも小さければボケては見えないので、ピントの合っている範囲として許容でき、つまりピクセルサイズが「許容錯乱円」に相当します。
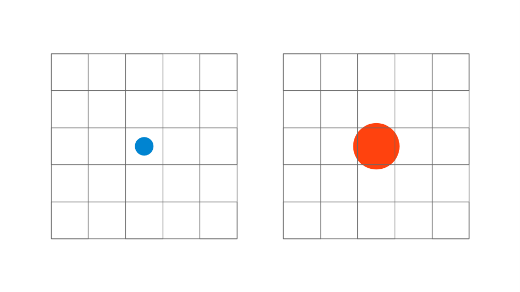
左図では錯乱円が1ピクセルの中に収まっているのでボケとして許容され、ピントが合っている状態
左図では錯乱円が1ピクセルよりもはみ出して周囲のピクセルでも観測され、ボケて見える状態
理想的には1点に収束している状態がピントの合っている状態ですが、ピクセルサイズの範囲であればボケ量として許容することができます。理想的なピント位置の前後で許容錯乱円に収まる範囲が「被写界深度」です。
撮像画像例
高さの違いが大きくて全面にピントを合わせるのが難しいものとして、6個のサンプルワークを準備しました。
液体レンズ搭載カメラを使用して手前側にピントが合っている状態から奥側にピントが合っている状態までの10枚の画像を撮り、ライブラリの新機能を使用して全焦点画像を生成します。
各サンプルワークの実物画像、手前側または奥側にピントが合っている状態、生成した全焦点画像を掲載します。
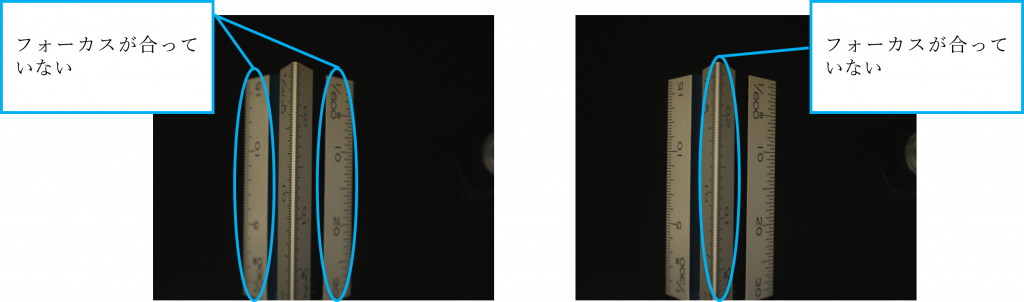
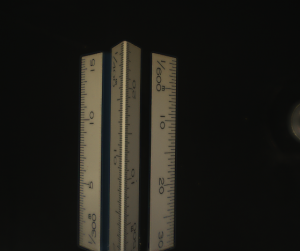
1.円筒形
円筒形の形状では、頂点部分と側面部分で高低差が大きく、両方にピントを合わせることが難しいです。
回転させてラインスキャンで撮像することが多いですが、断面が真円でなくて楕円のときや側面から見て台形のときなどには更に工夫が必要になってきます。
画像の歪みを許容できるかと機構・制御の難易度とのバランスによっては1方向からの撮像も有用です。
 評価対象
評価対象
 左図:手前側にピントが合っている状態、右図:奥側にピントが合っている状態
左図:手前側にピントが合っている状態、右図:奥側にピントが合っている状態
 全焦点画像
全焦点画像
2.三角錐
円筒形と同じく、頂点部分と側面部分で大きな高低差があります。
斜めの面に正対する位置にカメラを設置して撮る方法も考えられますが、左右両側を撮るためにはカメラを2台使用するか、対象物を移動させるなどの工夫が必要になります。計測用途では正対して撮像した方が処理を単純化できて有利ではありますが、用途によっては1方向からの撮像も十分に選択肢の一つになり得ます。
 評価対象
評価対象
 左図:手前側にピントが合っている状態、右図:奥側にピントが合っている状態
左図:手前側にピントが合っている状態、右図:奥側にピントが合っている状態
 全焦点画像
全焦点画像
3.複雑形状
金属部品や樹脂部品などの中には高低差のある複雑な形状を持つものがあります。
対象物を移動させて各面を撮像する方法もありますが、ロボットで対象物またはカメラをハンドリングするとなると大掛かりになりがちです。
少なくとも高さの違いは一方向からの撮像で吸収できれば、取り回しの難易度を下げることができます。
 評価対象
評価対象
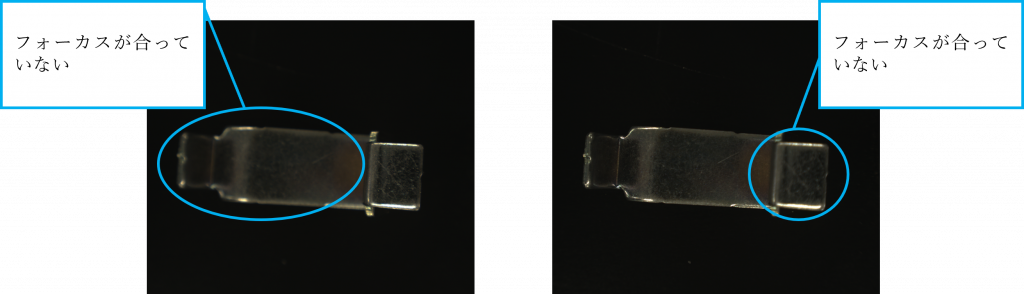 左図:手前側にピントが合っている状態、右図:奥側にピントが合っている状態
左図:手前側にピントが合っている状態、右図:奥側にピントが合っている状態
 全焦点画像
全焦点画像
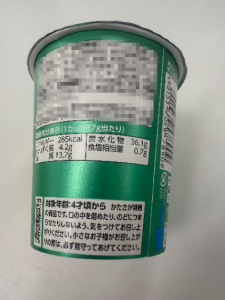
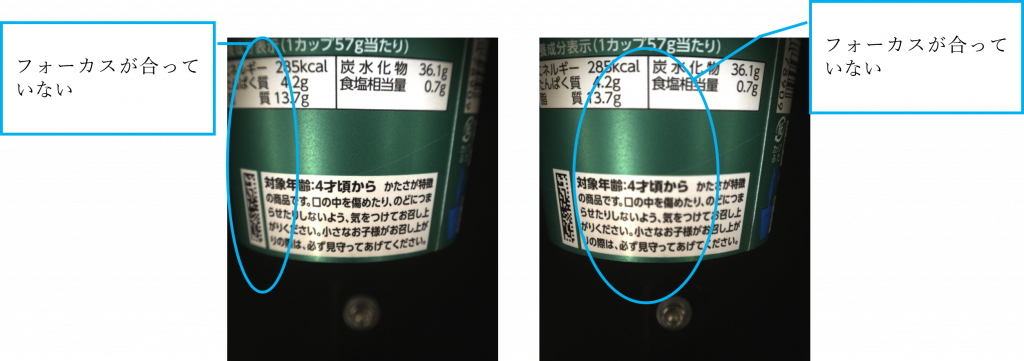
4.パッケージ
厚みのある製品をパッケージングすると、厚みの分の高低差が生じます。
製品本体とパッケージの台紙の両方を確認しようとすると、それぞれの高さに合わせてカメラの撮像距離を調整する必要があります。そのため、後から中間の高さも確認したいとなった場合は、追加の改造が必要となります。
初めから中間の高さの画像も含めて撮像しておいて全体にピントを合わせることができれば、将来的な拡張を見据えた構想ができます。
 評価対象
評価対象
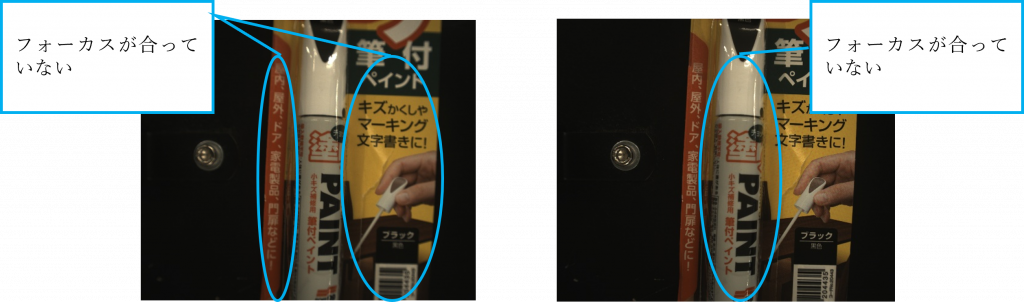 左図:手前側にピントが合っている状態、右図:奥側にピントが合っている状態
左図:手前側にピントが合っている状態、右図:奥側にピントが合っている状態
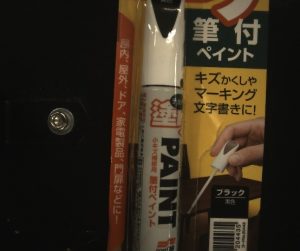 全焦点画像
全焦点画像
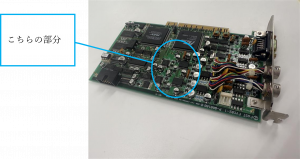
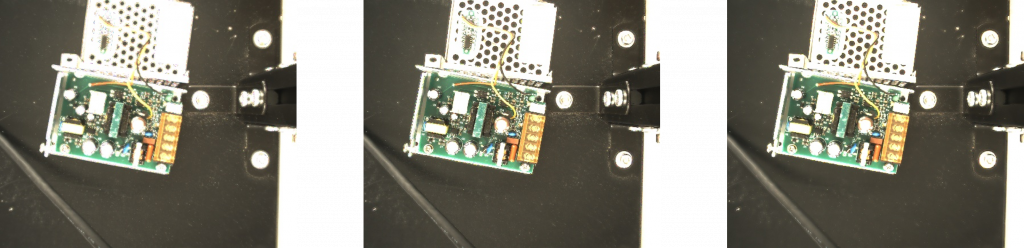
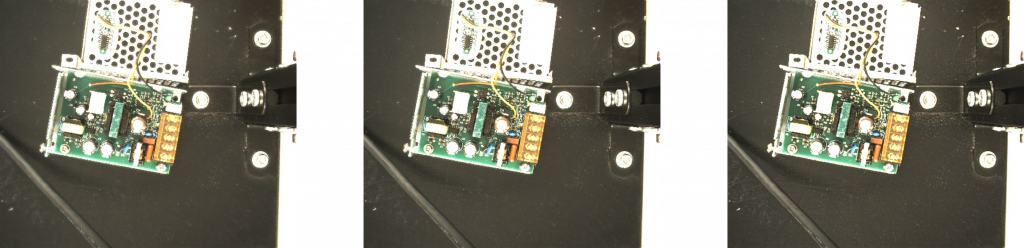
5.基板側面
基板には高さのある部品が実装されていることがあり、横から覗き込むようにして見たいこともあります。
レンズをイメージセンサに対してあえて傾け、光路長を調整することで、斜めからでも平面全体にピントを合わせる「チルトシフト撮影」という手法もあります。ただ、対象箇所ごとに角度が異なる場合、この方法でも十分に対応することは難しくなります。
どの角度から撮像する場合でも、平面全体にピントを合わせられる構成であれば、より柔軟性が高まります。
 評価対象
評価対象
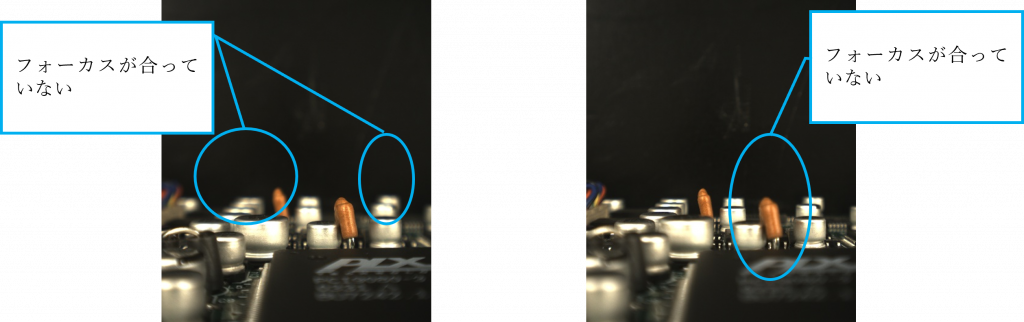 左図:手前側にピントが合っている状態、右図:奥側にピントが合っている状態
左図:手前側にピントが合っている状態、右図:奥側にピントが合っている状態
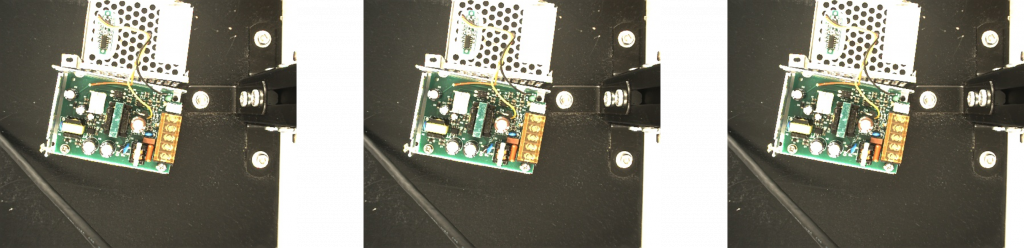
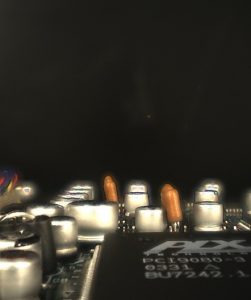 全焦点画像
全焦点画像
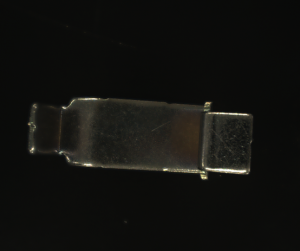
6.リレー
天面の印字と端子の部分で大きな高低差があります。
1種類だけであれば天面と端子部分のそれぞれにピントを合わせた位置の2枚を撮像することもできますが、高さの異なるものが混在すると高さの種類毎に切り替えるのか、3枚以上を撮像しておくのか、複雑になります。
天面の高さの最大から端子部分までを撮っておきさえすれば良いとなると単純化できます。
 評価対象
評価対象
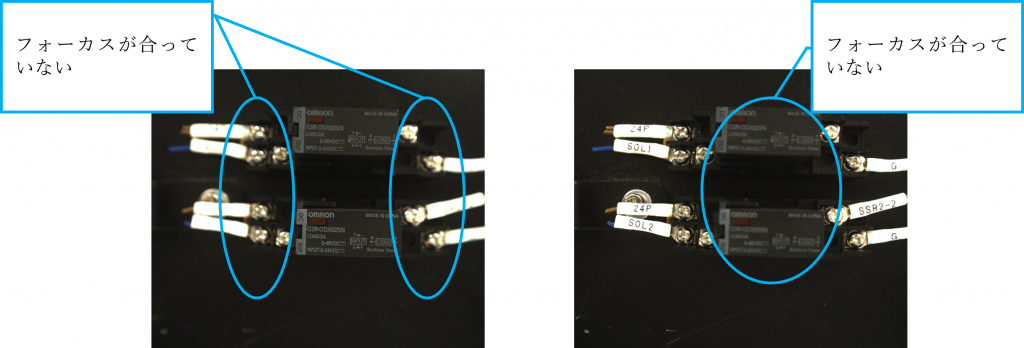 左図:手前側にピントが合っている状態、右図:奥側にピントが合っている状態
左図:手前側にピントが合っている状態、右図:奥側にピントが合っている状態
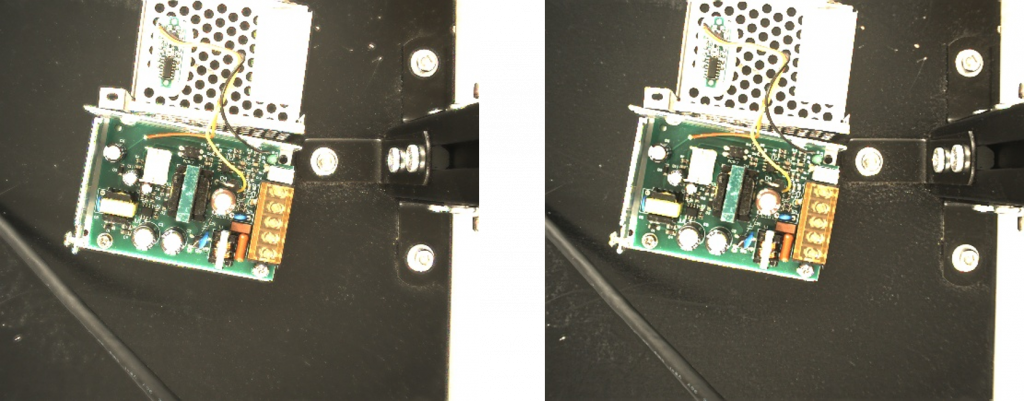
 全焦点画像
全焦点画像
調整のポイント
全焦点画像生成のパラメータは最もピントの合っている画像の推定方法を2種類から選択して、それぞれの手法に応じたパラメータを調整します。パラメータは多くはありませんが、サンプル画像を撮って試している中での感覚的な調整方針もご紹介します。
手法はDoA(Difference of Average)またはLoG(Laplacian of Gaussian)から選択できます。LoGの方が調整するパラメータは1つだけであるのに対して、DoAの方が調整の自由度は高い印象です。
 左図:LoG(パラメータ:1.0)のとき、右図:DoA(パラメータ:25、1)のとき
左図:LoG(パラメータ:1.0)のとき、右図:DoA(パラメータ:25、1)のとき
それぞれの手法でのパラメータの内容と、これまでの体感での調整指針のイメージです。
- LoGのパラメータ:Gaussianフィルタのカーネルサイズ(σの値)
- 含まれるボケ具合をガウシアンフィルタで平滑化したと考えたときのカーネルサイズを想像すると良さそうな印象です
- DoAのパラメータ:2つのAverageフィルタのサイズ
- 一方の大きい方のフィルタサイズを大きくしていくと、大域的な模様のエッジの乱れを抑制できる印象です
- 他方の小さい方のフィルタサイズを小さくしていくと、細かな模様を残しやすくなる印象です
 LoGのパラメータを変更した様子:左から 0.6、1.0、3.0
LoGのパラメータを変更した様子:左から 0.6、1.0、3.0
 DoAのパラメータを変更した様子:左から 5、9、25(小さい方のフィルタサイズは1で共通)
DoAのパラメータを変更した様子:左から 5、9、25(小さい方のフィルタサイズは1で共通)
 DoAのパラメータを変更した様子:左から 1、3、5(大きい方のフィルタサイズは25で共通)
DoAのパラメータを変更した様子:左から 1、3、5(大きい方のフィルタサイズは25で共通)
対応バージョンと使用関数
今回のサンプルで使用した関数とそのリファレンス、対応バージョンです。技術的な詳細は下記もあわせてご参照ください。
FIE関数 fnFIE_allinfocus、fnFIE_imgstack_alloc、fnFIE_imgstack_push_backなど
リファレンス FIE module – ビジョンツール – 全焦点画像生成 / FIE module – 画像スタックオブジェクト
対応バージョン WIL 3.1.0.18(FIE 4.0.1)
まとめ
今回はライブラリ新機能の全焦点画像生成を使用したサンプル画像をご紹介しました。
これまでの撮像の課題であった高さの違いの大きい対象物に対して、ピント位置を変えた複数枚を撮像して合成することで全体にピントの合った画像を合成できるようになりました。今回は液体レンズ搭載カメラを使用しましたが、固定焦点のレンズで撮像距離(Working Distance)を変える方法も考えられます。
今後、計測・検査・位置決めにおいて求められる精度が一段と高まる中、またイメージセンサの画素サイズの微細化によって被写界深度が不足しやすくなる状況に対し、本機能は必ずお役に立てるものと考えております。
また、全焦点画像生成のアルゴリズムの改善も引き続き検討を進めています。お気づきの点がございましたら、どうぞお気軽にお申し付けいただけますと幸いです。
今後とも、皆様のお役に立てる機能を追加、ブラッシュアップするべく開発を続けてまいりますので、何卒よろしくお願い申し上げます。

関連製品

-
装置メーカー 画像処理ソフト
【画像処理マスターへの道】AIを使いこなす鍵は、“弱点の補完”にあり!
-
装置メーカー 画像処理ソフト
【画像処理マスターへの道】実は身近で使われている画像処理
-
装置メーカー 画像処理ソフト
【画像処理マスターへの道】次の一歩を手前の一歩から考える~分割点灯の照らす世界~
-

装置メーカー 画像処理ハード
【画像処理マスターへの道】画像処理装置に新しいファミリーが増えています!
-

装置メーカー 画像処理ソフト
【画像処理マスターへの道】研究トレンド最前線 ~ブレイク直前の技術を先取り!~
-

装置メーカー 計測・検査・位置合わせ
【画像処理マスターへの道】高精度位置決め実験レポート~超精密ステージで1μmの壁に挑む!
-

生産現場 計測・検査
【画像処理マスターへの道】高精度位置決めリベンジ報告~めざせ、サブミクロンを1回で~